Датчик скорости б/у Ford Focus I Форд Фокус 1 (фф1) с доставкой в Новосибирск
Купить датчик скорости на Ford Focus I (Форд Фокус 1 (фф1)) в Новосибирске:
Товар в наличии по состоянию на 09.03.2023 16:19:
отсортировать товар по релевантностиценегоду выпусканазванию детали
2970 р. На складеКУПИТЬ
FO687251 | Датчик скорости | Ford Focus 1 (1998 – 2007) | 2970 р. На складеКУПИТЬ | ||
Технические характеристики датчика скорости: Тех. характеристики:
| Выпуск: | 1998–2004 (рестайл в 2001 г. ) ) |
| Тип топлива: | Бензин |
| Объём ДВС, л: | 1.4 л |
| Тип кузова: | Хетчбэк (5 дв.) |
Ищете датчик скорости?
Подберём и доставим запчасти для а/м Фокус 1 (фф1)
в Новосибирск
Доставка от 2 до 6 дней
Наложенный платеж. Оплата при получении.
Большой ассортимент
более 400 000 запчастей
Лидеры на рынке
крупнейшая компания
Высококлассные специалисты
профессиональный подход
Ответственность
перед клиентами
Быстрая доставка
в любой город России
Гарантия на детали
30 дней на ДВС, 14 на остальное
Мы работаем уже 5 лет на рынке запчастей Ford, и нашими клиентами стали тысячи довольных покупателей.
На нашей разборке Ford в Санкт-Петербурге и Новосибирске работают только профессионалы.
Если вам нужны оригинальные запчасти на а/м Ford Focus I хорошего качества по невысокой цене, ваш выбор — FINNAUTOPARTS.
Отзывы о компании FINNAUTOPARTS:
В основе философии нашей компании лежит индивидуальный подход к каждому клиенту. Именно поэтому наши клиенты всегда остаются довольны работой с нами. Если вам нужны запчасти для а/м Ford, позвоните по телефону +7 383 383-06-57 — наши специалисты подберут для вас лучший вариант по оптимальной цене.
Клиент:
18.12.2019 MSK
Спасибо Большое Вашей компании! Доставкой доволен, Компания хорошая советую Друзья!
FINNAUTO
Клиент:
22.06.2015 MSK
Просил отправить ТК “Деловые линии”. Отправили ТК ПЭК
Клиент:
17.12.2022 MSK
Спасибо вам большое. Генератор получили,проверили на стенде,все работает. Менеджеры сработали без нареканий.
Клиент:
12.11.2014 MSK
Сделали скидку на доставку, прежде чем отправить детали прислали фотки деталей как они есть. Моё пожелание фотайте потёртости на месте, крупно. В целом молодцы.
Моё пожелание фотайте потёртости на месте, крупно. В целом молодцы.
Клиент:
28.12.2013 MSK
спасибо и с наступающим новым годом. правый привод подошел очень рад.
Все отзывы
Патент США на обнаружение аномалий нити с использованием интегратора и компаратора в сочетании с вращающимся диском натяжения нити. Патент (Патент № 4,196,685, выдан 8 апреля 1980 г.) машина. Более конкретно, оно относится к системе автоматической остановки швейной машины, когда нить машины запуталась или порвалась.
Наиболее распространенные промышленные и бытовые швейные машины, используемые сегодня, были оснащены системами управления приводом с ножным контроллером. Ножной контроллер содержит контакт переключателя и переменный резистор, состоящий из резистора и ползунка. Ползунок обычно касается контакта переключателя и перемещается вдоль резистора в соответствии с усилием оператора, воздействующим на педаль. Швейная машина находится в состоянии покоя, когда ползунок касается контакта переключателя, и начинает двигаться, когда ползунок касается разомкнутой клеммы резистора под действием направленного вниз усилия на педаль. Скорость шитья увеличивается с продвижением движения ползунка к другому выводу резистора за счет увеличения силы, направленной вниз. При уменьшении силы, направленной вниз, ползунок перемещается к контакту переключателя, и скорость шитья снижается, затем швейная машина останавливается, когда ползунок касается контакта переключателя. Поэтому требуется относительно много времени для остановки швейной машины после случайного пропуска швейных стежков, запутывания ткани на швейной машине или обрыва, расхода или запутывания верхней или нижней швейной нити. Поскольку обнаружение несчастных случаев оператором иногда происходит с опозданием, сброс усилия, направленного вниз от ножного контроллера, задерживается после происшествия. Однако желательно остановить швейную машину как можно быстрее после возникновения аварийных ситуаций с швейными нитками или тканью.
Скорость шитья увеличивается с продвижением движения ползунка к другому выводу резистора за счет увеличения силы, направленной вниз. При уменьшении силы, направленной вниз, ползунок перемещается к контакту переключателя, и скорость шитья снижается, затем швейная машина останавливается, когда ползунок касается контакта переключателя. Поэтому требуется относительно много времени для остановки швейной машины после случайного пропуска швейных стежков, запутывания ткани на швейной машине или обрыва, расхода или запутывания верхней или нижней швейной нити. Поскольку обнаружение несчастных случаев оператором иногда происходит с опозданием, сброс усилия, направленного вниз от ножного контроллера, задерживается после происшествия. Однако желательно остановить швейную машину как можно быстрее после возникновения аварийных ситуаций с швейными нитками или тканью.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, целью изобретения является создание системы управления приводом, которая автоматически останавливает швейную машину сразу же после возникновения аварийных ситуаций с швейными нитками или тканью.
Еще одной целью изобретения является создание системы управления приводом, которая контролирует движение множества швейных ниток и останавливает швейную машину при ненормальном состоянии нитей.
Еще одной целью изобретения является создание системы управления приводом, которая применима для контроля не только движения швейной нити, но также множества швейных ниток и автоматически останавливает швейную машину в ненормальном состоянии движения.
Еще одной целью изобретения является создание усовершенствованной системы управления приводом, которая совместима с управлением приводом швейной машины с ножным контроллером и автоматически останавливает швейную машину сразу же после возникновения аварийных ситуаций с швейными нитками или ткань.
Согласно изобретению система управления приводом содержит один или несколько преобразователей, которые соединены с дисковыми узлами натяжения нити швейной машины для преобразования вращения дисковых узлов в колебательный электрический сигнал; одну или несколько схем измерителя скорости, которые обнаруживают уменьшение скорости вращения дисковых блоков, контролируя колебательный электрический сигнал; и электрическую логическую схему, на которую подается питание для генерирования сигнала индикации привода в ответ на замыкание пускового выключателя и обесточивается в ответ на замыкание остановочного выключателя и обнаружение падения скорости вращения. В одном варианте осуществления изобретения преобразователи включают соответственно магнитную шестерню и датчик магнитного потока, такой как элемент Холла, индукционную катушку и магнитную головку. Входные и выходные клеммы преобразователей выполнены в виде вилки, а входные клеммы цепей измерителя скорости выполнены в виде штепсельной розетки с возможностью разъемного соединения преобразователей с цепями измерителя скорости. Схемы измерителя скорости включают соответственно схему формирования и усиления для формирования колебательного электрического сигнала от преобразователей в последовательность импульсов, моностабильный мультивибратор для формирования импульсов постоянной длительности синхронно с импульсами от схем формирования и усиления, интегрирующая схема, интегрирующая импульсы моновибратора, компаратор, сравнивающий выходное напряжение интегрирующей схемы с опорным напряжением и формирующий осмысленный сигнал (низкий уровень «0»), когда первое падает ниже второго, и логический « или” элемент, включенный между выходным выводом моновибратора и входным выводом интегрирующей схемы, который пропускает выходные импульсы мультивибратора и питает интегрирующую схему напряжением, достаточным для предотвращения формирования осмысленного сигнала на выходе вывод компаратора при отключении преобразователей от измерителя скорости схема.
В одном варианте осуществления изобретения преобразователи включают соответственно магнитную шестерню и датчик магнитного потока, такой как элемент Холла, индукционную катушку и магнитную головку. Входные и выходные клеммы преобразователей выполнены в виде вилки, а входные клеммы цепей измерителя скорости выполнены в виде штепсельной розетки с возможностью разъемного соединения преобразователей с цепями измерителя скорости. Схемы измерителя скорости включают соответственно схему формирования и усиления для формирования колебательного электрического сигнала от преобразователей в последовательность импульсов, моностабильный мультивибратор для формирования импульсов постоянной длительности синхронно с импульсами от схем формирования и усиления, интегрирующая схема, интегрирующая импульсы моновибратора, компаратор, сравнивающий выходное напряжение интегрирующей схемы с опорным напряжением и формирующий осмысленный сигнал (низкий уровень «0»), когда первое падает ниже второго, и логический « или” элемент, включенный между выходным выводом моновибратора и входным выводом интегрирующей схемы, который пропускает выходные импульсы мультивибратора и питает интегрирующую схему напряжением, достаточным для предотвращения формирования осмысленного сигнала на выходе вывод компаратора при отключении преобразователей от измерителя скорости схема. Электрическая логическая схема включает в себя элемент логического «И», на который подаются выходы схем измерителя скорости, моностабильный мультивибратор, формирующий импульс при снижении на выходе элемента «И» низкого уровня «0», первая логическая схема, на которую подается питание для генерирования сигнала индикации базового привода замыканием пускового выключателя и обесточивается замыканием стопорного выключателя или импульсом от моностабильного мультивибратора в электрической логической схеме, цепь задержки, обеспечивающая базовый привод сигнал индикации с задержкой, и вторую логическую схему, которая генерирует сигнал индикации возбуждения, подходящий для фактического управления приводом швейной машины, в ответ на основной сигнал индикации возбуждения, выходной сигнал логического элемента «и» и выходной сигнал цепь задержки. Сигнал индикации возбуждения возбуждает цепь питания соленоида, которая управляет соединением муфты двигателя швейной машины.
Электрическая логическая схема включает в себя элемент логического «И», на который подаются выходы схем измерителя скорости, моностабильный мультивибратор, формирующий импульс при снижении на выходе элемента «И» низкого уровня «0», первая логическая схема, на которую подается питание для генерирования сигнала индикации базового привода замыканием пускового выключателя и обесточивается замыканием стопорного выключателя или импульсом от моностабильного мультивибратора в электрической логической схеме, цепь задержки, обеспечивающая базовый привод сигнал индикации с задержкой, и вторую логическую схему, которая генерирует сигнал индикации возбуждения, подходящий для фактического управления приводом швейной машины, в ответ на основной сигнал индикации возбуждения, выходной сигнал логического элемента «и» и выходной сигнал цепь задержки. Сигнал индикации возбуждения возбуждает цепь питания соленоида, которая управляет соединением муфты двигателя швейной машины.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
РИС. 1 представляет собой блок-схему одного варианта осуществления изобретения;
1 представляет собой блок-схему одного варианта осуществления изобретения;
РИС. 2 представляет собой вид спереди швейной машины, оснащенной системой управления приводом согласно изобретению;
РИС. 3 представляет собой увеличенный вид в перспективе части швейной машины, показанной на фиг. 2;
РИС. 4 графически показаны уровни выходного напряжения некоторых элементов, показанных на фиг. 1; и
РИС. 5 показана схема сигнализации, которая может быть объединена с системой, показанной на фиг. 1.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ВОПЛОЩЕНИЯ
На фиг. 1 чертежей с 1 1 по 1 n обозначают преобразователи, каждый из которых предназначен для каждого из узлов диска натяжения нити швейной машины. Преобразователи с 1 1 по 1 n соответственно имеют магнитную шестерню с 2 1 по 2 n, датчик потока с 3 1 по 3 n и штепсельные клеммы 4 1 . через 4n, которые предназначены для соединения с гнездовыми контактами 51-5n цепей датчиков скорости, которые соответственно содержат формирующую и усиливающую схемы 61-6n, моностабильный мультивибратор с 7 1 по 7 1 по 7 n , логический элемент «или» с 8 1 по 8 n и схему 9 определения уровня. 1-9 n. Осциллирующее напряжение генерируется на датчиках потока 31-3n за счет вращения магнитных шестерен 21-2n соответственно. Схемы определения уровня с 9 1 по 9 n схем измерителя скорости соответственно имеют интегрирующую схему с IC 1 по IC n и компаратор с COM 1 по COM n. . Элемент логического «и» 10, моностабильный мультивибратор 17, первая логическая схема 18, схема задержки 19 и вторая логическая схема 18 составляют электрическую логическую схему. 11 указывает на нормально замкнутый контакт, который размыкается через мгновение после окончания шитья (например, шитья заданного шаблона). 13 указывает на нормально разомкнутый контакт пускового выключателя. 15 указывает на нормально разомкнутый контакт выключателя остановки. Формирующая схема 12 поглощает дребезжащий шум и выдает хорошо сформированный импульс в качестве сигнала индикации окончания, когда контакт 11 замыкается через мгновение. Формирующая схема 14 поглощает дребезжащий шум и выдает хорошо сформированный импульс в качестве сигнала индикации запуска, когда контакт 13 замыкается через мгновение.
1-9 n. Осциллирующее напряжение генерируется на датчиках потока 31-3n за счет вращения магнитных шестерен 21-2n соответственно. Схемы определения уровня с 9 1 по 9 n схем измерителя скорости соответственно имеют интегрирующую схему с IC 1 по IC n и компаратор с COM 1 по COM n. . Элемент логического «и» 10, моностабильный мультивибратор 17, первая логическая схема 18, схема задержки 19 и вторая логическая схема 18 составляют электрическую логическую схему. 11 указывает на нормально замкнутый контакт, который размыкается через мгновение после окончания шитья (например, шитья заданного шаблона). 13 указывает на нормально разомкнутый контакт пускового выключателя. 15 указывает на нормально разомкнутый контакт выключателя остановки. Формирующая схема 12 поглощает дребезжащий шум и выдает хорошо сформированный импульс в качестве сигнала индикации окончания, когда контакт 11 замыкается через мгновение. Формирующая схема 14 поглощает дребезжащий шум и выдает хорошо сформированный импульс в качестве сигнала индикации запуска, когда контакт 13 замыкается через мгновение. Формирующая схема 16 поглощает дребезжащий шум и выдает хорошо сформированный импульс в качестве сигнала индикации остановки, когда контакт 15 замыкается через мгновение. Выходной импульс со схемы формирования 12 и выходное напряжение компараторов СОМ1-СОМn подаются на логический элемент “и” 10 электрической логической схемы. Первая логическая схема 18 электрической логической схемы содержит логический элемент «ИЛИ» 1, на который поступают импульсы с выхода формирующей схемы 16 и мультивибратора 17, а также выход логического «или» элемента ИЛИ. .2 второго логического контура 20 питаются; и триггер FF 1 , который устанавливается при нарастании выходного импульса схемы формирования 14 и сбрасывается при нарастании выходного сигнала логического «или» элемента ИЛИ 1 . Выходное напряжение (высокий уровень «1» при заданных условиях) на выходной клемме Q триггера FF1 подается на схему задержки 19.и вторую логическую схему 20. Схема 19 задержки подает задержанный сигнал, имеющий время задержки Td относительно выхода на клемме Q триггера FF1 со второй логической схемой 20.
Формирующая схема 16 поглощает дребезжащий шум и выдает хорошо сформированный импульс в качестве сигнала индикации остановки, когда контакт 15 замыкается через мгновение. Выходной импульс со схемы формирования 12 и выходное напряжение компараторов СОМ1-СОМn подаются на логический элемент “и” 10 электрической логической схемы. Первая логическая схема 18 электрической логической схемы содержит логический элемент «ИЛИ» 1, на который поступают импульсы с выхода формирующей схемы 16 и мультивибратора 17, а также выход логического «или» элемента ИЛИ. .2 второго логического контура 20 питаются; и триггер FF 1 , который устанавливается при нарастании выходного импульса схемы формирования 14 и сбрасывается при нарастании выходного сигнала логического «или» элемента ИЛИ 1 . Выходное напряжение (высокий уровень «1» при заданных условиях) на выходной клемме Q триггера FF1 подается на схему задержки 19.и вторую логическую схему 20. Схема 19 задержки подает задержанный сигнал, имеющий время задержки Td относительно выхода на клемме Q триггера FF1 со второй логической схемой 20. Вторая логическая схема 20 электрической логической схемы содержит логическое «И». элементы И1-И3, логический элемент «ИЛИ» ИЛИ2, триггер FF2 и усилитель AMP. Выход на клемме Q триггера FF2 и выход схемы задержки 19 соответственно подаются на неинвертирующую входную клемму и инвертирующую входную клемму элемента «и» AND1, тогда как они соответственно подаются на инвертирующую входную клемму и неинвертирующий входной терминал элемента «и» AND2. Выходы схемы задержки 19и «и» элемента 10 соответственно применяются к неинвертирующему и инвертирующему входным клеммам «и». элемент И3. Триггер FF2 устанавливается при увеличении выхода элемента И1 и сбрасывается при увеличении выхода элемента И2 или И3 через «или». элемент OR2. Выходное напряжение (высокий уровень «1» в заданном состоянии) на выходной клемме Q триггера FF2 подается на усилитель AMP, выход которого, в свою очередь, подается на цепь 21 включения соленоида. Схема 21 возбуждения соленоида содержит переключающий транзистор Tr типа NPN, последовательно соединенный с катушкой реле Ry; диод, подключенный к катушке реле Ry, для поглощения индуцированного реверсирования напряжения на катушке реле Ry при подаче питания на катушку Ry; и нормально разомкнутый контакт Rc, который замыкается в ответ на подачу питания на катушку реле Ry и соединяет соленоид RPLC муфты двигателя с источником питания.
Вторая логическая схема 20 электрической логической схемы содержит логическое «И». элементы И1-И3, логический элемент «ИЛИ» ИЛИ2, триггер FF2 и усилитель AMP. Выход на клемме Q триггера FF2 и выход схемы задержки 19 соответственно подаются на неинвертирующую входную клемму и инвертирующую входную клемму элемента «и» AND1, тогда как они соответственно подаются на инвертирующую входную клемму и неинвертирующий входной терминал элемента «и» AND2. Выходы схемы задержки 19и «и» элемента 10 соответственно применяются к неинвертирующему и инвертирующему входным клеммам «и». элемент И3. Триггер FF2 устанавливается при увеличении выхода элемента И1 и сбрасывается при увеличении выхода элемента И2 или И3 через «или». элемент OR2. Выходное напряжение (высокий уровень «1» в заданном состоянии) на выходной клемме Q триггера FF2 подается на усилитель AMP, выход которого, в свою очередь, подается на цепь 21 включения соленоида. Схема 21 возбуждения соленоида содержит переключающий транзистор Tr типа NPN, последовательно соединенный с катушкой реле Ry; диод, подключенный к катушке реле Ry, для поглощения индуцированного реверсирования напряжения на катушке реле Ry при подаче питания на катушку Ry; и нормально разомкнутый контакт Rc, который замыкается в ответ на подачу питания на катушку реле Ry и соединяет соленоид RPLC муфты двигателя с источником питания.
РИС. 2 показана швейная машина с системой управления приводом, показанной на фиг. 1. Фиг. 3 показан в увеличенном масштабе вид в перспективе участка, показанного пунктирной линией III. Ссылаясь на фиг. 2 и фиг. 3 позицией 22 обозначен рабочий стол, на котором закреплен корпус 23 машины. 24 показывает планку нитенаправителя, имеющую отверстие, через которое проходит верхняя нить 25. Верхняя нить 25 в свою очередь проходит через направитель натяжения нити 26, нитенаправитель 27 и отверстие швейной иглы 28. Ведущий шкив 29и моторный шкив 31 соединены с бесконечным ремнем 30. Распределительная коробка 32, имеющая пусковой выключатель 13 и стопорный выключатель 15, закреплена на столе 22. Педаль 33 соединена с возможностью вращения с осью 34, которая, в свою очередь, закреплена на ножках Таблица 22. Соединительный стержень 35 соединен со стороной педали 33. Регулируемое соединение 37 соединяет соединительный стержень 35 с соединительным стержнем 36, который входит в зацепление с рычагом двигателя 38. Соленоид PRLC закреплен на пластине 39, которая соединена с ножки стола 22. Поршень, связанный с соленоидом PRLC, соединен с соединительным стержнем 40, который, в свою очередь, соединен с соединительным стержнем 40 с помощью регулируемого шарнира 41. Соединительный стержень 40 входит в зацепление с рычагом 38 двигателя. Рычаг 38 двигателя вращается против часовой стрелки, когда педаль 33 нажата или на соленоид PRLC подается питание. Рычаг 38 двигателя соединяет двигатель 43 сцепления со шкивом 31 двигателя, когда он вращается против часовой стрелки. 44 указывает устройство источника питания, имеющее выключатель питания. Стандарт 45 поднимается из таблицы 22. Стандарт 45 поддерживает стержень 46 для поддержки пучка верхней нити 48 и пучка нижней нити 49., и нитенаправительную рамку 47 с выступом 58. Угловая пластина 55 закреплена на нитенаправительной рамке 47 с помощью винта 59. Выступ 58 нитенаправительной рамы 47 входит в зацепление с отверстием угловой пластины 55. Коробка 56 закреплена на угловой пластине 55 винтами 57.
Соленоид PRLC закреплен на пластине 39, которая соединена с ножки стола 22. Поршень, связанный с соленоидом PRLC, соединен с соединительным стержнем 40, который, в свою очередь, соединен с соединительным стержнем 40 с помощью регулируемого шарнира 41. Соединительный стержень 40 входит в зацепление с рычагом 38 двигателя. Рычаг 38 двигателя вращается против часовой стрелки, когда педаль 33 нажата или на соленоид PRLC подается питание. Рычаг 38 двигателя соединяет двигатель 43 сцепления со шкивом 31 двигателя, когда он вращается против часовой стрелки. 44 указывает устройство источника питания, имеющее выключатель питания. Стандарт 45 поднимается из таблицы 22. Стандарт 45 поддерживает стержень 46 для поддержки пучка верхней нити 48 и пучка нижней нити 49., и нитенаправительную рамку 47 с выступом 58. Угловая пластина 55 закреплена на нитенаправительной рамке 47 с помощью винта 59. Выступ 58 нитенаправительной рамы 47 входит в зацепление с отверстием угловой пластины 55. Коробка 56 закреплена на угловой пластине 55 винтами 57. Конец оси поддерживается с возможностью вращения на угловой пластине 55. Магнитная шестерня 2 1 и пара дисков 51 1 и 51 2 натяжения нити соединены с ось. Диски 51 1 и 51 2 натяжения нити представляют собой упругие металлические пластины. Диск 51 1 прижат к диску 5 2 шайбой 54 и винтом 52. Верхняя нить 25, отвязанная от пучка нитей 48, проходит через отверстие нитенаправителя 53, паз между дисками 51 1 и 51 2, отверстие нитенаправителя 24, направляющую 26 натяжения нити и отверстие швейной иглы 28. Поэтому диски 51 1 , 51 2 и магнитная шестерня 2 1 приводятся во вращение верхней нитью 25 во время операции шитья швейной иглы 28. Датчик потока 3 1 и резисторы (см. фиг. 1) находятся в коробке 56. Штепсельные клеммы 4 . 1 собраны в штекере 64 1 , который входит в гнездо на блоке управления 60. Схема измерителя скорости, электрическая логическая схема и схема 21 возбуждения соленоида (за исключением соленоида PRLC), показанные на фиг. 1 находятся в блоке управления 60. Нижняя нить отвязана от пучка нитей 49проходит через отверстие 61 рамы нитенаправителя 47 и направляется к устройству 62 намотки нити, которое наматывает нижнюю нить на шпульку 63 нижней нити.
Конец оси поддерживается с возможностью вращения на угловой пластине 55. Магнитная шестерня 2 1 и пара дисков 51 1 и 51 2 натяжения нити соединены с ось. Диски 51 1 и 51 2 натяжения нити представляют собой упругие металлические пластины. Диск 51 1 прижат к диску 5 2 шайбой 54 и винтом 52. Верхняя нить 25, отвязанная от пучка нитей 48, проходит через отверстие нитенаправителя 53, паз между дисками 51 1 и 51 2, отверстие нитенаправителя 24, направляющую 26 натяжения нити и отверстие швейной иглы 28. Поэтому диски 51 1 , 51 2 и магнитная шестерня 2 1 приводятся во вращение верхней нитью 25 во время операции шитья швейной иглы 28. Датчик потока 3 1 и резисторы (см. фиг. 1) находятся в коробке 56. Штепсельные клеммы 4 . 1 собраны в штекере 64 1 , который входит в гнездо на блоке управления 60. Схема измерителя скорости, электрическая логическая схема и схема 21 возбуждения соленоида (за исключением соленоида PRLC), показанные на фиг. 1 находятся в блоке управления 60. Нижняя нить отвязана от пучка нитей 49проходит через отверстие 61 рамы нитенаправителя 47 и направляется к устройству 62 намотки нити, которое наматывает нижнюю нить на шпульку 63 нижней нити.
Швейная машина, показанная на фиг. 1, имеет дисковый узел натяжения нити, включающий в себя пару дисков 51 1 и 51 2 . Следовательно, преобразователи с 2 2 по 2 n и схемы измерителей скорости, соответствующие преобразователям с 2 2 по 2 n, могут быть исключены. Однако работа системы, показанной на фиг. 1 не зависит от количества преобразователей и цепей измерителя скорости. Следовательно, работа системы, показанной на фиг. 1 описывается далее в предположении, что швейная машина, показанная на фиг. 2, имеет множество блоков дисков натяжения нити, каждый из которых включает в себя пару дисков натяжения нити, таких как показано с помощью 51 1 и 51 2.
Снова обратимся к фиг. 1, от A 1 до An, от B 1 до B n , от C 1 до C n , от D 1 до D n , от F . с 1 по F n , с G 1 по G n и с H по S обозначают выходные сигналы нескольких элементов на фиг. 1, которые показаны на фиг. 4. A 1 – A n имеют положительный высокий уровень “1”, когда вилки 4 1 – 4 n преобразователей 1 1 – 1 n отключены от розетки.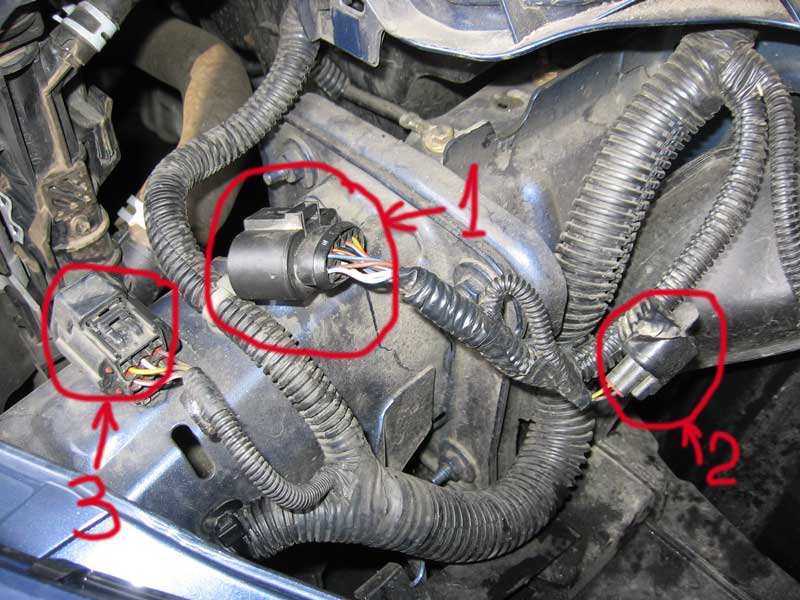 5 1 – 5 n цепей измерителя скорости. A 1 – A n имеют низкий уровень «0» при условии, что вилки с 4 1 по 4 n соединены с розетками с 5 1 по 5 n.
5 1 – 5 n цепей измерителя скорости. A 1 – A n имеют низкий уровень «0» при условии, что вилки с 4 1 по 4 n соединены с розетками с 5 1 по 5 n.
Предполагая, что вилки с 4 1 по 4 n соединены с розеткой с 5 1 по 5 n, выходы B 1 по B n преобразователей 1 . 1-1 n не колеблются, когда швейная машина находится в состоянии покоя. Поэтому мультивибраторы с 7 1 по 7 n не генерируют импульсы, а выходы G 1 – G n компараторов COM1 – COM n имеют низкий уровень «0». Таким образом, выход I элемента «и» 10 имеет низкий уровень «0», хотя выход H схемы формирования 12 имеет высокий уровень «1». Триггеры FF1 и FF2 находятся в состоянии сброса. Таким образом, на выходе усилителя AMP низкий уровень «0», недостаточный для включения транзистора Tr. Когда контакт 13 пускового переключателя моментально замыкается (пуск 1 на фиг. 4), схема формирования 14 формирует импульс K 1 , который устанавливает триггер FF1. Таким образом, выход N триггера FF1 повышается до высокого уровня «1», который подается на вывод установки триггера FF2 через элемент «и» AND1. Триггер FF2 устанавливается и выдает на выходе R высокий уровень «1», а транзистор Tr включается, чтобы подать питание на соленоид PRLC через катушку реле Ry и его контакт Rc. Поэтому рычаг 38 двигателя вращается в направлении против часовой стрелки, а шкив 31 двигателя приводится во вращение двигателем сцепления 43, затем приводятся в действие швейные иглы, и верхние нитки перемещаются к иглам. Магнитные шестерни с 2 1 по 2 n вращаются в ответ на движение нитей, посредством чего на выходы 3 1 по 3 n датчиков потока с 3 1 по 3 n .n генерируют и мультивибраторы генерируют импульсы, которые в свою очередь подаются на интегрирующие цепи с IC 1 по IC n через элементы «или» с 8 1 по 8 n . По истечении времени задержки на выходах F1-Fn интегральных схем IC1-ICn превышают опорное напряжение и на выходах G1-Gn компараторов COM1-COMn подняться на высокий уровень «1». При этом выход I элемента «и» 10 поднимается до высокого уровня «1». Между импульсом К 1 и нарастанием выхода I элемента «и» 10 имеется время задержки Td.
Триггер FF2 устанавливается и выдает на выходе R высокий уровень «1», а транзистор Tr включается, чтобы подать питание на соленоид PRLC через катушку реле Ry и его контакт Rc. Поэтому рычаг 38 двигателя вращается в направлении против часовой стрелки, а шкив 31 двигателя приводится во вращение двигателем сцепления 43, затем приводятся в действие швейные иглы, и верхние нитки перемещаются к иглам. Магнитные шестерни с 2 1 по 2 n вращаются в ответ на движение нитей, посредством чего на выходы 3 1 по 3 n датчиков потока с 3 1 по 3 n .n генерируют и мультивибраторы генерируют импульсы, которые в свою очередь подаются на интегрирующие цепи с IC 1 по IC n через элементы «или» с 8 1 по 8 n . По истечении времени задержки на выходах F1-Fn интегральных схем IC1-ICn превышают опорное напряжение и на выходах G1-Gn компараторов COM1-COMn подняться на высокий уровень «1». При этом выход I элемента «и» 10 поднимается до высокого уровня «1». Между импульсом К 1 и нарастанием выхода I элемента «и» 10 имеется время задержки Td. Схема задержки 19имеет время задержки Td и подает на выход 0 высокого уровня «1», который запаздывает на Td с выхода N высокого уровня «1» триггера FF1. Выходы S и Q элементов «и» И2 и И3 имеют низкий уровень «0» в течение времени задержки Td из-за низкого уровня «0» выхода 0 схемы задержки 19, а также низкий уровень «0» по истечении времени задержки Тд обусловлен высоким уровнем «1» выходов N и I триггера FF1 и «и» элемента 10 соответственно. Поэтому триггер FF2 не сбрасывается в течение времени задержки Td. Предполагая, что поток, например. верхняя нить 25 обрывается и магнитная шестерня 2 1 прекращает вращение, выход В 1 датчика потока 3 1 становится плоским и гладким, а мультивибратор 7 1 прекращает генерацию импульсов. Затем выход F 1 интегрирующей схемы IC 1 падает ниже опорного напряжения, а выход G 1 компаратора COM1 падает до низкого уровня «0». Поэтому выход I элемента «и» 10 падает до низкого уровня «0». Мультивибратор 17 формирует импульс J при уменьшении сигнала I и выходе S элемента «и» И3 повышается до высокого уровня «1».
Схема задержки 19имеет время задержки Td и подает на выход 0 высокого уровня «1», который запаздывает на Td с выхода N высокого уровня «1» триггера FF1. Выходы S и Q элементов «и» И2 и И3 имеют низкий уровень «0» в течение времени задержки Td из-за низкого уровня «0» выхода 0 схемы задержки 19, а также низкий уровень «0» по истечении времени задержки Тд обусловлен высоким уровнем «1» выходов N и I триггера FF1 и «и» элемента 10 соответственно. Поэтому триггер FF2 не сбрасывается в течение времени задержки Td. Предполагая, что поток, например. верхняя нить 25 обрывается и магнитная шестерня 2 1 прекращает вращение, выход В 1 датчика потока 3 1 становится плоским и гладким, а мультивибратор 7 1 прекращает генерацию импульсов. Затем выход F 1 интегрирующей схемы IC 1 падает ниже опорного напряжения, а выход G 1 компаратора COM1 падает до низкого уровня «0». Поэтому выход I элемента «и» 10 падает до низкого уровня «0». Мультивибратор 17 формирует импульс J при уменьшении сигнала I и выходе S элемента «и» И3 повышается до высокого уровня «1». Таким образом, триггер FF1 сбрасывается импульсом J, а триггер FF2 сбрасывается по выходу S через элемент «или» OR2. Затем выходной сигнал усилителя AMP падает до низкого уровня «0», чтобы выключить транзистор Tr. Катушка реле Ry обесточивается и контакт Rc размыкается. Поэтому соленоид PRLC обесточивается, и шкив 31 двигателя отделяется от двигателя сцепления 43. Таким образом, швейная машина останавливает операцию шитья.
Таким образом, триггер FF1 сбрасывается импульсом J, а триггер FF2 сбрасывается по выходу S через элемент «или» OR2. Затем выходной сигнал усилителя AMP падает до низкого уровня «0», чтобы выключить транзистор Tr. Катушка реле Ry обесточивается и контакт Rc размыкается. Поэтому соленоид PRLC обесточивается, и шкив 31 двигателя отделяется от двигателя сцепления 43. Таким образом, швейная машина останавливает операцию шитья.
Триггеры FF1 и FF2 установлены, и швейная машина начинает операцию шитья, снова замыкая контакт 13 через мгновение (K 2 , начало 2 на фиг. 4). Если предположить, что нить, которая приводит в движение магнитную шестерню 3 2 , запуталась, скорость вращения магнитной шестерни 3 2 становится медленной, а выходной сигнал F 2 интегрирующей схемы IC 2 падает ниже опорного напряжения. Поэтому выходы G 2 и I компаратора СОМ2 и элемента «и» 10 соответственно падают до низкого уровня «0». Поэтому триггеры FF1 и FF2 сбрасываются, и швейная машина останавливает операцию шитья.
Если предположить, что одна или несколько нитей не находятся в канавке дисковых блоков натяжения нити и контакт 13 мгновенно замыкается (начало 3 на РИС. 4), триггеры FF1 и FF2 устанавливаются, и швейная машина запускает швейная операция. Однако триггеры FF1 и FF2 сбрасываются, и швейная машина прекращает шитье после времени задержки Td, поскольку один или несколько выходов компараторов не поднимаются до высокого уровня «1» даже после времени задержки Td, а выход S поднимается до высокого уровня «1» по истечении времени задержки Td и сбрасывает триггер FF2 через элемент «или» OR2.
Предположим, что контакт 13 снова замкнулся через мгновение (начало 4 на РИС. 4), триггеры FF1 и FF2 были установлены и швейная машина также работает, триггеры FF1 и FF2 сброшены, и швейная машина останавливает операцию шитья, когда контакт 15 замыкается через мгновение. Потому что формирующая схема 16 формирует импульс L в ответ на замыкание контакта 15 и импульс L сбрасывает триггер FF1 через элемент «или» OR1. Выход N триггера FF1 падает до нижнего рычага «0» в ответ на импульс (L). Однако выход 0 схемы задержки 19остается высоким уровнем «1» в течение времени задержки Td. Таким образом, на выходе Q элемента «и» И2 находится высокий уровень «1» в течение времени задержки Td после импульса L. Триггер FF2 сбрасывается при повышении на выходе Q элемента «и» И2. При мгновенном размыкании контакта 11 при установленном состоянии триггеров FF1 и FF2 выход I элемента «и» 10 падает до низкого уровня «0» в ответ на отрицательный импульс Н от формирующей схемы 12 и мультивибратора 17. и элемент «и» AND3 генерирует импульсы J, S, которые сбрасывают триггеры FF1 и FF2 через элементы «или» OR1 и OR2 соответственно.
Выход N триггера FF1 падает до нижнего рычага «0» в ответ на импульс (L). Однако выход 0 схемы задержки 19остается высоким уровнем «1» в течение времени задержки Td. Таким образом, на выходе Q элемента «и» И2 находится высокий уровень «1» в течение времени задержки Td после импульса L. Триггер FF2 сбрасывается при повышении на выходе Q элемента «и» И2. При мгновенном размыкании контакта 11 при установленном состоянии триггеров FF1 и FF2 выход I элемента «и» 10 падает до низкого уровня «0» в ответ на отрицательный импульс Н от формирующей схемы 12 и мультивибратора 17. и элемент «и» AND3 генерирует импульсы J, S, которые сбрасывают триггеры FF1 и FF2 через элементы «или» OR1 и OR2 соответственно.
Сигнал A 1 повышается до высокого уровня «1» при отсоединении вилки 4 1 от розетки 5 1 . В этом случае на интегрирующую схему IC 1 через элемент «или» 8 1 непрерывно подается напряжение высокого уровня «1». Таким образом, выходной сигнал G 1 постоянно имеет высокий уровень «1». Если предположить, что вилка 4 1 отключена от розетки 5 1 и контакт 13 моментально замкнут (начало 5 на фиг. 4), выход I элемента «и» 10 определяется выходами G 2 через G n . Это означает, что преобразователь 1 1 и схема измерителя скорости (5 1 через COM 1 ), соответствующая преобразователю 1 1 , не влияют на работу электрической логической схемы (10 через AMP ). Аналогично, любой из преобразователей и соответствующая ему схема измерителя скорости могут быть отключены в отношении операции управления остановом электрической логической схемы путем отсоединения вилки преобразователя от розетки, соответствующей вилке. Поэтому система, показанная на фиг. 1 применим для наблюдения за перемещением одного или нескольких потоков.
4), выход I элемента «и» 10 определяется выходами G 2 через G n . Это означает, что преобразователь 1 1 и схема измерителя скорости (5 1 через COM 1 ), соответствующая преобразователю 1 1 , не влияют на работу электрической логической схемы (10 через AMP ). Аналогично, любой из преобразователей и соответствующая ему схема измерителя скорости могут быть отключены в отношении операции управления остановом электрической логической схемы путем отсоединения вилки преобразователя от розетки, соответствующей вилке. Поэтому система, показанная на фиг. 1 применим для наблюдения за перемещением одного или нескольких потоков.
Швейная машина, показанная на РИС. 2 имеет педаль 33, соединенную с рычагом 38 двигателя. Таким образом, операциями запуска и остановки швейной машины можно управлять с помощью педали 33. Следовательно, оператор может управлять швейной машиной, нажимая на педаль, когда верхняя нить 25 оборвана или требуется намотка нижней нити на шпульку 63.
Предпочтительно снабдить систему цепью аварийной сигнализации для предупреждения оператора, когда система автоматически останавливает швейную машину. ИНЖИР. 5 показан пример схемы сигнализации. На фиг. 5 триггер FF3 задается выходом J мультивибратора 17; триггер FF4 задается выходом элемента «или» OR3; триггеры FF3 и FF4 сбрасываются с выхода К схемы формирования 14; инвертированный выходной сигнал (H) схемы 12 формирования подается на входную клемму элемента «ИЛИ» OR3 через инвертор; выход L схемы формирования 15 подается на другой входной контакт элемента «ИЛИ» OR3; выходы на клеммах Q и Q триггеров FF3 и FF4 соответственно применяются к элементу «и» AND4; и выход элемента «и» AND4 подается на лампу и зуммер 65. Триггеры FF3 и FF4 сбрасываются при замыкании контакта 13. Таким образом, выходы на клеммах Q и Q триггеров FF3 и FF4 имеют низкий уровень. уровень «0» и высокий уровень «1» соответственно. На выходе элемента «и» AND4 низкий уровень «0». При обнаружении неисправности нити любой из цепей измерителя скорости и выработке импульса мультивибратором 17 триггер FF3 устанавливается в исходное состояние, а на выходе элемента «и» AND4 поднимается до высокого уровня «1», что приводит к включению лампы.
ИНЖИР. 5 показан пример схемы сигнализации. На фиг. 5 триггер FF3 задается выходом J мультивибратора 17; триггер FF4 задается выходом элемента «или» OR3; триггеры FF3 и FF4 сбрасываются с выхода К схемы формирования 14; инвертированный выходной сигнал (H) схемы 12 формирования подается на входную клемму элемента «ИЛИ» OR3 через инвертор; выход L схемы формирования 15 подается на другой входной контакт элемента «ИЛИ» OR3; выходы на клеммах Q и Q триггеров FF3 и FF4 соответственно применяются к элементу «и» AND4; и выход элемента «и» AND4 подается на лампу и зуммер 65. Триггеры FF3 и FF4 сбрасываются при замыкании контакта 13. Таким образом, выходы на клеммах Q и Q триггеров FF3 и FF4 имеют низкий уровень. уровень «0» и высокий уровень «1» соответственно. На выходе элемента «и» AND4 низкий уровень «0». При обнаружении неисправности нити любой из цепей измерителя скорости и выработке импульса мультивибратором 17 триггер FF3 устанавливается в исходное состояние, а на выходе элемента «и» AND4 поднимается до высокого уровня «1», что приводит к включению лампы. и устройство зуммера 65. При управлении нормальной остановкой швейной машины с помощью контакта 11 или 15 импульс от схемы формирования 12 или 16 устанавливает триггер FF4 через элемент «или» OR3. Таким образом, выход элемента «и» AND4 не поднимается до высокого уровня «1», даже если триггер FF3 установлен выходным импульсом мультивибратора 17.
и устройство зуммера 65. При управлении нормальной остановкой швейной машины с помощью контакта 11 или 15 импульс от схемы формирования 12 или 16 устанавливает триггер FF4 через элемент «или» OR3. Таким образом, выход элемента «и» AND4 не поднимается до высокого уровня «1», даже если триггер FF3 установлен выходным импульсом мультивибратора 17.
Как описано выше, система управления приводом по изобретению обнаруживает обрыв и спутывание нитей, спутывание ткани, случайный пропуск швейных стежков и расход верхней или нижней нити посредством контроля скорости вращения дисков натяжения нити и автоматически останавливает швейную машину при обнаружении неисправности нити. Предотвращается распространение проблемы, особенно на высокоскоростной швейной машине. Определение скорости вращения является точным, поскольку датчики потока обнаруживают зубья магнитных шестерен, а шаг зубьев мал. Обнаружение неисправности резьбы является более точным по сравнению с обнаружением с помощью микропереключателей или фотодатчиков.
Понятно, что специалисты в данной области техники могут вносить изменения и модификации в вышеупомянутую систему управления приводом для швейной машины. Например, элементы «или» с 8 1 по 8 n могут быть подключены между компараторами СОМ 1 по СОМ n и элементом «и» 10; элементы «и» и «или» могут быть другими логическими элементами за счет изменения полярности сигналов; механизм связи между рычагом 38 двигателя и педалью может быть устранен путем размещения переключателей пуска и останова 13 и 15 в положениях, в которых они приводятся в действие педалью 33; и рычаг 38 двигателя и соленоид PRLC могут быть устранены путем использования электромагнитной муфты в швейной машине и включения ее в ответ на возбуждение катушки реле Ry.
Введение Во многих приложениях передачи необходимо генерировать несколько аналоговых выходов с точно известной относительной фазой. При использовании ЦАП с мультиплексными входами (MUX-DAC), такого как MAX19692, или интерполирующего ЦАП с выходом тактового сигнала данных, скорость входных данных в 1/N раз превышает скорость обновления ЦАП, и ЦАП фиксирует данные на одном уровне. или оба перехода синхронизации данных. В MAX19692 N = 4, а скорость ввода данных составляет одну четвертую скорости обновления ЦАП. ЦАП выводит тактовый сигнал данных (DATACLK), полученный из входного тактового сигнала с помощью цифрового делителя тактового сигнала. На рис. 2 показана упрощенная блок-схема интерфейса часов (CLKP, CLKN) и часов данных (DATACLKP, DATACLKN) MAX19692. Начальное деление тактовой частоты на 4 выполняется с помощью 2-битного счетчика и используется для фиксации цифровых входов ЦАП. Счетчик может запускаться в одном из четырех состояний ( Рисунок 3 ). При использовании двух MUX-DAC эти два DAC могут запускаться в разных состояниях. Это может привести к задержке фиксируемого экземпляра DAC1 на -1, 0, 1 или 2 такта по отношению к фиксируемому экземпляру DAC2. Начальное деление тактовой частоты на 4 выполняется с помощью 2-битного счетчика и используется для фиксации цифровых входов ЦАП. Счетчик может запускаться в одном из четырех состояний ( Рисунок 3 ). При использовании двух MUX-DAC эти два DAC могут запускаться в разных состояниях. Это может привести к задержке фиксируемого экземпляра DAC1 на -1, 0, 1 или 2 такта по отношению к фиксируемому экземпляру DAC2.Выходной сигнал тактовой частоты данных MAX19692 делится еще на 2 или 4 раза меньше, чем тактовая частота фиксации ввода данных. Затем данные фиксируются на обоих фронтах тактового сигнала в режиме двойной скорости передачи данных (DDR) или на каждых 90 градусах тактового сигнала в режиме четырехкратной скорости передачи данных (QDR). Если задержки тактов данных нескольких ЦАП совпадают или такты данных инверсны друг другу, такты фиксации также будут совпадать. Проблема синхронизации ЦАП состоит из двух компонентов.
Подстройка фазы ЦАП путем «проглатывания» тактовых импульсов Если для ЦАП используются прямоугольные часы (например, ECL), синхронизация между двумя ЦАП может быть достигнута с помощью простой высокоскоростной логической схемы, показанной на рис. Вставка логического элемента И (G1) в тактовый тракт MUX-DAC1 позволяет манипулировать тактовым сигналом MUX-DAC1. Логический элемент И (G2) вставляется в тактовый тракт к MUX-DAC2 для согласования задержки. Вентиль XOR (G3) действует как фазовый детектор. Он выводит «1», когда выходы DATACLK1 и DATACLK2 различны. Если G3out = “1”, тактовый импульс на MUX-DAC1 должен быть “проглочен” для смещения фронта DATACLK1 на один тактовый период CLK. Нарастающий фронт на выходе G3 ( G3out ) обнаруживается детектором положительного фронта (PED), состоящим из FF1 и G4. Если обнаружен нарастающий фронт, PED выводит «0» в течение одного тактового цикла. Настройка фазы ЦАП путем сдвига входных данныхУсовершенствованный менеджер цифровых часов (DCM) в Xilinx® FPGA можно использовать для обнаружения разности фаз между часами данных обоих MUX-DAC (  Из настроек задержки можно вычислить количество тактовых циклов ЦАП, необходимое для задержки данных в MUX-DAC1, чтобы они были в фазе с данными в MUX-DAC2. Задержку данных можно изменить с шагом в один тактовый цикл ЦАП, внедрив бочкообразный сдвиг 4 x 4 в FPGA (см. рис. 6). Из настроек задержки можно вычислить количество тактовых циклов ЦАП, необходимое для задержки данных в MUX-DAC1, чтобы они были в фазе с данными в MUX-DAC2. Задержку данных можно изменить с шагом в один тактовый цикл ЦАП, внедрив бочкообразный сдвиг 4 x 4 в FPGA (см. рис. 6). MAX19692 имеет четыре параллельных порта данных, обозначенных A, B, C и D. Последовательность слов, подаваемых на ЦАП, следующая: A n , B n , C n , D n , A n+1 , B n+1 , C n+1 , D n+1 , A n+2 и т. д. данные на MUX-DAC1 должны быть задержаны на -1, 0, 1 или 2 цикла CLK. Таким образом, задержку данных можно регулировать до тех пор, пока два ЦАП не будут выводить данные в фазе. В этом случае часы данных двух ЦАП могут быть отключены на целое число периодов часов (CLK), и не предпринимается никаких попыток изменить это. Поскольку время установки и удержания ЦАП привязано к часам данных, синхронизация данных на два ЦАП должна быть разной. Синхронизация ЦАП с использованием одного PLL для каждого ЦАПЕсли ЦАП тактируются с помощью синтезатора с фазовой автоподстройкой частоты (ФАПЧ), в одном из методов синхронизации двух ЦАП используется отдельная ФАПЧ для тактирования каждого ЦАП (, рис. 7, ). Фазы выходных тактовых импульсов данных LVDS ЦАП1 и ЦАП2 сравниваются с эталонным тактовым сигналом. В этом случае встроенные в ЦАП делители тактовых импульсов используются в качестве делителей обратной связи в ФАПЧ генерации тактовых импульсов. Это решение позволяет согласовать время установки и удержания двух ЦАП. Однако у этого решения есть два недостатка: дополнительная стоимость двух PLL и возможные ограничения производительности, возникающие из-за ограничений фазового шума в PLL. |
 В квадратурном модуляторе (, рис. 1, ) каналы I и Q должны иметь четко определенное соотношение фаз, чтобы добиться подавления изображения. На рисунке 1 задержки DAC1 и DAC2 должны быть хорошо согласованы. Передатчикам, использующим цифровое формирование луча, может потребоваться точное управление относительной фазой большого количества ЦАП.
В квадратурном модуляторе (, рис. 1, ) каналы I и Q должны иметь четко определенное соотношение фаз, чтобы добиться подавления изображения. На рисунке 1 задержки DAC1 и DAC2 должны быть хорошо согласованы. Передатчикам, использующим цифровое формирование луча, может потребоваться точное управление относительной фазой большого количества ЦАП.
 3. Часы с фиксацией MAX19692 (четыре возможных состояния).
3. Часы с фиксацией MAX19692 (четыре возможных состояния).  0076 Рисунок 4 . Для ясности логика на этой схеме настроена на несимметричную функциональность. Однако более практичная реализация будет использовать дифференциальную логику, такую как ECL, для высокой скорости и низкого уровня шума.
0076 Рисунок 4 . Для ясности логика на этой схеме настроена на несимметричную функциональность. Однако более практичная реализация будет использовать дифференциальную логику, такую как ECL, для высокой скорости и низкого уровня шума. Затем этот сигнал повторно синхронизируется с помощью FF2, прежде чем он (SPB) подается на G1, что приводит к подавлению одного тактового импульса на MUX-DAC1. Это задерживает DATACLK1 на один тактовый цикл CLK. Через несколько тактов задержка DATACLK1 выравнивается с DATACLK2, как показано на рис. 9.0076 Рисунок 5
Затем этот сигнал повторно синхронизируется с помощью FF2, прежде чем он (SPB) подается на G1, что приводит к подавлению одного тактового импульса на MUX-DAC1. Это задерживает DATACLK1 на один тактовый цикл CLK. Через несколько тактов задержка DATACLK1 выравнивается с DATACLK2, как показано на рис. 9.0076 Рисунок 5 
 Этого можно достичь, используя несколько DCM в FPGA, управляющем ЦАП.
Этого можно достичь, используя несколько DCM в FPGA, управляющем ЦАП.