Снять датчик скорости Ford Focus 1. Замена датчика скорости Форд Фокус 1
Временный или полный отказ в работе спидометра, увеличенный расход топлива, внезапная остановка двигателя при движении накатом – это, пожалуй, самые основные признаки неисправного датчика скорости на автомобиле Форд Фокус. О том, как самостоятельно выполнить замену вышедшего из строя датчика на вашем автомобиле и пойдет речь в сегодняшней публикации.
Прежде чем приступить к замене, необходимо купить датчик скорости. Для Форд Фокуса первого поколения, на которых установлена механическая КПП IB5 подойдут датчики по таким кат. номерам.
1 087 548
1 953 481
1 066 383
1 062 545
1 079 388
1 085 854
Если на автомобиле установлена АКПП Эра, номер по каталогу датчика – 550289
Купить датчики частоты вращения коробки передач на Ford Focus 1 можно в этом магазине.
Инструкция по замене датчика скорости на автомобиле Ford Focus 1
С левой стороны коробки передач находим датчик и обильно обрызгиваем его WD-40 (некоторые автолюбители рекомендуют выполнить эту процедуру за несколько дней до начала ремонтных работ, за это время посадочное место датчика и фиксирующего штифта “откиснет”, что позволит избежать трудностей по их извлечению).
Хочется сразу предупредить всех, кто будет самостоятельно производить замену датчика скорости, самым сложным в этой операции является извлечения фиксирующего штифта. В случае его повреждения или облома, вам предстоит снятие коробки передач.
Первым делом, чтобы извлечь датчик нужно вытащить фиксирующий штифт. Это сделать можно двумя способами.
Первый способ
- Для удобного доступа к шплинту, отламываем пластиковое ушко на датчике.

- Затем плоскогубцами захватываем выступающую его часть и с помощью струбцины фиксируем положение пассатижей и вытаскиваем шплинт

Меняем датчик скорости Форд Фокус 1
Второй способ
Как и в первом варианте отламываем пластиковое ухо на датчике
- Теперь вам понадобится маленький съемный патрон для обычных сверл от перфоратора, который необходимо надеть на торчащий шплинт, и умеренным усилием зажать его.
- Затем крутим патрон и понемногу вытягиваем шплинт
После этого можно вынимать сам датчик скорости Форд Фокус 1. Иногда могут возникнуть трудности, в этом случае можно изготовить небольшое приспособление, с помощью которого вы легко и быстро сможете извлечь его.
Для изготовления съемника вам понадобятся две пряжки от обычного брючного ремня. На одной стороне пряжки делаем пропилы по 13 мм, и загибаем под форму крючка фиксирующий усик.
Меняем датчик скорости Форд Фокус 1
Теперь цепляем приспособление за края датчика и, подцепив его мощной отверткой, не спеша вытягиваем.
При подготовке публикации о том, как заменить датчик скорости Ford Focus 1 была использована информация с сайта ffclub.ru
Самостоятельная замена датчика скорости Форд Фокус 1
Выход из строя датчика скорости на Форд Фокус 1 — одна из наиболее распространенных поломок, которые случаются с этим автомобилем. Симптомы указывающие на необходимость замены датчика скорости, как правило, всегда одни и те же:
- Во время движения он самопроизвольно отключается, стрелка спидометра при этом падает на отметку “0”. Холостые обороты — “750” (как во время стоянки на месте).
- При переключениях на ходу авто может просто заглохнуть.
- Отсутствие сигнала с датчика скорости ведет к неминуемому перерасходу топлива.
- Ухудшается отклик на педаль газа.
Перед тем как заменить датчик скорости Форд Фокус 1 я решил изучить проблему и прочел техдокументацию. Вооружившись всеми необходимыми знаниями и инструментами, решил произвести самостоятельную замену датчика скорости Ford Focus 1.
Для работы вам понадобится:
- Проникающая жидкость WD-40.
- Новый датчик скорости Форд Фокус 1 + штифт.
- Плоскогубцы или кусачки.
- Несколько капель масла.
Замена датчика скорости Форд Фокус 1 своими руками — пошаговая инструкция
1. Прогрейте двигатель до рабочей температуры.
2. Откройте капот.
3. Найдите датчик скорости и штифт (штырь), который фиксирует датчик. Снимите колодку проводов датчика.
4. Обработайте штифт жидкостью WD-40.
5. Приступайте к извлечению штырька, для этого можно использовать кусачки или плоскогубцы.
6. Теперь приступайте к извлечению самого датчик скорости. Здесь нужно чувствовать, слегка расшатывая его из стороны в сторону, датчик должен выйти.
7. Теперь подготовьте новый датчик скорости Ford Focus 1. Смазав его уплотнительные кольца маслом, установите на место и зафиксируйте штифтом. Если нового штифта нет, то установите старый, предварительно выровняв его.
Собираем инструмент, моем руки, и проверяем работу! Как видите, замена датчика скорости Форд Фокус не сложная и легко выполнимая работа, которую вы в силах выполнить своими руками.
Обзор и замена датчиков Ford Focus 1 (холостого хода, скорости и других): где находятся регуляторы?
Датчик холостого хода Форд Фокус 1 – один из важнейших приборов в системе автомобиля. Очень важно знать и о других датчиках автомобиля, ведь если быть с машиной на «ты», тогда можно обойти большинство несложных, а может и серьезных проблем.
Содержание
[ Раскрыть]
[ Скрыть]
Описание и особенности замены контроллеров
О работе системы автомобиля должен знать каждый автолюбитель. Подробнее о самых важных деталях, таких как датчик температуры и скорости, а также других устройствах, принимающих активное участие в работе, – ниже.
Деталь для машиныДМРВ
ДМРВ – это датчик массового расхода воздуха. Этот агрегат обязательно должен быть в рабочем состоянии, потому что от него зависит систематическая подача топлива. ДМРВ просто передает показания на мозг или ЭБУ (электронный блок управления двигателем).
ДМРВ просто передает показания на мозг или ЭБУ (электронный блок управления двигателем).
Массовый расход воздуха не содержит в себе систему диагностики, это просто датчик. ДМРВ всегда должен показывать верное значение для правильного расхода топлива. Диагностировать работу нужно осторожно. При этом необходимо опираться на сравнение старого и нового ДМРВ (автор видео — Инжектор-Сервис Воронеж).
Холостого хода
Датчик холостого хода, который находится на впускном коллекторе, управляется так же ЭБУ для поддержания нужных оборотов двигателя на ХХ. Если он ломается, то обороты двигателя не будут соответствовать норме (завышены, занижены, машина глохнет, плавает ХХ). Иногда для ремонта хватает чистки.
Диагностику этого элемента необходимо проводить сразу же, как обороты двигателя начали беспричинно увеличиваться или уменьшаться. В случае если при переключении передачи заглох мотор, нужно заменить датчик холостого хода. Поломка может произойти по нескольким причинам. Например, если регулятор попросту износился, или если дроссельная заслонка не полностью закрывается. Это может наблюдаться при перепадах температуры извне.
Поломка может произойти по нескольким причинам. Например, если регулятор попросту износился, или если дроссельная заслонка не полностью закрывается. Это может наблюдаться при перепадах температуры извне.
Чтобы произвести проверку детали нужно проделать следующие манипуляции:
- Поднять машину и включить стояночный тормоз.
- Открыть капот и снять прибор, отсоединив крепежи и проводку.
- Подключить к тестируемой детали мультиметр, активировав режим «напряжение-сопротивление». Напряжение должно быть около 12 Вт, а сопротивление находиться в пределах 50 Ом.
Замена — также несложная задача:
- Необходимо поднять машину, и отсоединить от АКБ клеммы.
- Затем отсоединить дроссель, и открутить болты, которые в определенном положении фиксируют регулятор. Важно: один из болтов также соединен с проводкой, поэтому необходимо быть осторожнее.
- После этого можно снимать ДХХ, очищать воздушный клапан дросселя и место установки уплотнительного кольца от засорений.
- Далее нужно проверить уплотнитель на наличие расслоения и прочее. После этого, в том случае, если никаких дефектов не наблюдается, нужно смазать уплотнительное кольцо машинным маслом. Установить его и вернуть на место датчик холостого хода.
- После этого закрепить деталь болтами, установить на место дроссель и, подключив аккумулятор, запустить мотор.

Фотогалерея «Установка ДХХ»
На фото, расположенных чуть ниже, можно узнать подробнее о расположении датчика, о котором идет речь.
Включения вентилятора
Исправный вентилятор должен поддерживать определенную температуру в автомобиле. На данном авто контроллер включения вентилятора и контроллер температуры — это одно и то же, вентилятором управляет ЭБУ: он смотрит на показания температуры и при достижении нужных показаний включает вентилятор.
Включение вентилятора часто зависит от скорости движения автомобиля и количества оборотов двигателя, и на основе этой информации система решает, включить или нет датчик. Если показания датчика искажены и он показывает неверное значение, это может привести к перегреву мотора.
Если показания датчика искажены и он показывает неверное значение, это может привести к перегреву мотора.
Чтобы протестировать работу датчика, необходимо следовать инструкции:
- Запустить двигатель. Он должен работать на холостом ходу в течение периода тестирования.
- По истечению двух минут нужно зарегистрировать значение напряжение датчика СНТ. Фиксировать показатели необходимо каждую минуту.
- Нужно записать тенденцию изменения датчика и указать, как сильно изменится напряжение. Передача сигнала должна сравниваться с показателями, приведенными в инструкции.
Скорости
О том, что из строя вышел датчик скорости Форд Фокус 1, можно понять благодаря отказу спидометра, остановке двигателя и даже увеличении расхода топлива.
Детали для автомобиляПеред заменой этой важной детали нужно приобрести новый датчик скорости.
После покупки можно успешно приступить к замене:
- Поднять машину и найти с левой стороны от коробки передач нужный датчик. Его необходимо сбрызнуть специальным аэрозольным препаратом. Чтобы деталь немного расшаталась, можно сделать это за несколько часов до основной работы.
- Далее, чтобы изъять устройство, нужно снять фиксирующий штифт. Делать это нужно очень осторожно, ведь при малейшей поломке придется изымать коробку передач.
- Чтобы провести операцию без неприятностей, на приборе для доступа к шплинту нужно аккуратно отломить пластиковое ушко. Затем при помощи инструмента зафиксировать оставшуюся часть и осторожно вытащить шплинт.
- После этого можно изъять датчик скорости.
 Его необходимо сбрызнуть специальным аэрозольным препаратом. Чтобы деталь немного расшаталась, можно сделать это за несколько часов до основной работы.
Его необходимо сбрызнуть специальным аэрозольным препаратом. Чтобы деталь немного расшаталась, можно сделать это за несколько часов до основной работы.Коленвала
Датчик коленвала — это специальное устройство, работающее затем, чтобы превращать энергию, сгорающую в цилиндре двигателя газов, в механическую энергию. По этому регулятору ЭБУ ориентируется, когда давать команду форсункам на впрыск топлива в цилиндр. Без него, в случае неисправности, двигатель не заведется и машина не поедет. Поэтому в случае мельчайшей поломки нужно тут же обратиться в специальный центр по ремонту, или попытаться исправить проблему своими руками.
- Поднять машину, слить масло и отключить АКБ.
- После этого отключить защиту двигателя и крышку ГРМ.
- Освободить моторный отсек, открутив фиксирующие болты, предназначенные для защиты.
- Снять ремень генератора, а затем правое колесо.
- Заменить деталь новой и собрать все в обратном порядке.
Поломка этого прибора могла произойти по нескольким причинам, одна из которых, конечно, время. Но если у вас относительно новая деталь, возможно, причина кроется в другом.
- Возможно, проблема в некачественном масле. Если фильтр или масло были заменены не вовремя, это могло привести к загрязнению внутри сальников коленвала.
- Если при ремонте были нанесены царапины или появились трещины на корпусе.
- Если случился перегрев двигателя, мог расплавиться уплотнитель в коленвале. Он не подлежит починке, эта деталь должна сразу же замениться.
Температуры
Датчик температурыДатчик температуры предназначен для регулировки температуры в двигателе. Для правильной работы системы, температура всегда должна быть под контролем и находиться приблизительно на одном уровне, но случаются и такое, когда датчик температуры сломан.
Для правильной работы системы, температура всегда должна быть под контролем и находиться приблизительно на одном уровне, но случаются и такое, когда датчик температуры сломан.
Например, если градус резко повышается при торможении автомобиля на светофоре. Конечно, при таком положении вещей нужно немедленно брать дело в свои руки и приступать к скорой замене датчика температуры. В таком случае он первый, на что следует обратить внимание.
Видео «Проверка датчика температуры»
От автора Техник-механик можно узнать о том, как протестировать датчик температуры.
Загрузка …Датчик температуры Форд Фокус 1: ремонт температурного измерителя
Датчик температуры форд фокус 1 соответствует аналогичным приборам в последующих версиях форд фокус 2 и форд фокус 3. По сути своей все последующие модели являются обычным рестайлингом предыдущей модели. Могут добавляться дополнительные функции на подобии датчиков слежения за усталостью водителя. Изменяется внешний вид транспортного средства, но внутренний мир остается прежним за незначительными изменениями.
Могут добавляться дополнительные функции на подобии датчиков слежения за усталостью водителя. Изменяется внешний вид транспортного средства, но внутренний мир остается прежним за незначительными изменениями.
Отсюда и выходят всё те же возникающие проблемы, те же слабые места и те же способы их починки.
Какие бывают неисправности температурного сенсора?
Слабым местом в автомобилях форд фокус, как и в их брате, форд эскорт является проводка и опасность ржавления. Покупая эти автомобили с рук, всегда в первую очередь проверяется каждый уголок на наличие ржавчины, а потом осматривается электронная проводка. Ее замыкание и износ практически повсеместны в автомобилях этого производителя.
Загрузка …Нельзя сказать, что эти недочеты являются легко исправляемыми. Одно дело, когда производитель вставляет дешевые осветительные приборы, выходящие из строя в ближайший месяц эксплуатации, и совсем другое дело проводка и подверженность металла коррозии.
Замена проводки стоит баснословных денег, а попустительствовать с ее периодическим выходом из строя означает ждать, когда она выведет из строя или замкнет другие устройства, к которым подключена. Аналогичным образом и металл, как разрастающаяся опухоль, которую потом приходится вырезать целыми пластами.
Аналогичным образом и металл, как разрастающаяся опухоль, которую потом приходится вырезать целыми пластами.
Корпус термостата
Температурные датчики в результате чаще всего не являются источником проблемы, но являются ее продолжением. В случае если температурный механизм показывает неверные данные, или с мотором возникли проблемы связанные с датчиком, в первую очередь проверьте контакты проводки, прочистите их, удостоверьтесь в отсутствии проблем на протяжении всего провода.
С развитием модели автомобиля становится всё больше зондов, а с ними и проблемы. С кондиционерами приходили температурные детекторы внутреннего воздуха. Так же как и у детектора температуры охлаждающей жидкости, основной его проблемой была проводка.
Рекомендуем купить
Замена измеряющих детекторов
Как правило, заменой зондов занимается сервисная служба, однако на деле это не так сложно осуществить и самому. Обычно это осуществляется в четыре простых этапа:
Обычно это осуществляется в четыре простых этапа:
- диагностика проблемы;
- осмотр проводки;
- отключение проводов;
- замена детектора.
В отношении ДТОЖ это выглядит несколько сложнее, так как там перед откручиванием прибора надлежит слить охлаждающую жидкость. Если охлаждающую жидкость не слить она обязательно выльется при откручивании прибора.
Замена термостата в авто Форд Фокус
А в плане диагностики ДТОЖ определяется целым перечнем проблем:
- внезапная остановка работы двигателя;
- автомобиль заводится не с первого раза;
- грязный выхлоп;
- повышенный расход топлива, вплоть до тридцати дополнительных процентов от обычного.
В целях экономии замену детектора охлаждающей жидкости нужно проводить практически незамедлительно. Охлаждающую жидкость сливать необходимо не только во избежание потерь антифриза, но и для того чтобы эта жидкость не ошпарила или не облила вас под возможным напором. По этой же причине автомобилю лучше дать остыть после работы.
Диагностировать датчик имеет смысл, только если вы не уверены, что сломался именно он. В противном случае старый прибор можно сразу выкидывать, так как ремонту он не подлежит. А на его место устанавливается новый измеритель, с новым кольцом уплотнителя и герметиком при необходимости.
YouTube responded with an error: The provided API key has an IP address restriction. The originating IP address of the call (87.236.20.136) violates this restriction.
Сделай мне плавно: как быстро и недорого отучить АКПП пинаться
Что и зачем тормозить?
Начнём с теоретического экскурса в механическо-гидравлические дебри АКПП. Будет немного скучно, но недолго.
Итак, во всех АКПП есть несколько общих крупных узлов. Первый из них — гидротрансформатор, который заменяет автомату сцепление механической коробки. Он же — ГДТ, он же — “бублик”. Второе название, как вы уже поняли, гидротрансформатор получил из-за внешней схожести с этим съедобным мучным изделием. Там есть турбинное колесо, насосное колесо и реактор. И масло. Задача ГДТ — передать вращение с маховика двигателя на вал планетарной передачи.
Там есть турбинное колесо, насосное колесо и реактор. И масло. Задача ГДТ — передать вращение с маховика двигателя на вал планетарной передачи.
Планетарная передача — это и есть набор шестерён различных передач. В общем-то, тоже похоже на обычную механику: меняется комбинация шестерён — меняется передаточное число (происходит смена передач, так же, как и в МКПП). Для смены передач нужен набор фрикционов и тормозных механизмов.
Есть ещё управляющее устройство — гидроблок. Если вы когда-нибудь слышали, что в АКПП есть соленоиды, которые что-то там переключают, то откроем секрет: они стоят как раз в гидроблоке, а задача этих клапанов (которые часто называют соленоидами) – перераспределять потоки ATF (трансмиссионной жидкости) для включения нужных передач в соответствии с сигналами датчиков и прочей электроники, обработанными в блоке управления автоматом.
На планетарных редукторах АКПП стоят фрикционные диски. Они могут находиться в разомкнутом состоянии (и тогда они вращаются свободно) или смыкаться для передачи момента солнечной шестерни планетарного редуктора (как вы знаете, в планетарном редукторе шестерни вставлены друг в друга).
Фрикционы собраны в пакеты, которые часто называют барабанами. Сейчас барабаны часто делят на две категории — сцепления и торможения. Первые нужны для того, о чём рассказывали выше — чтобы передавать вращение с одного вала на другой.
А вот барабан торможения нужен как раз для торможения одного из элементов планетарного механизма для выбора правильной комбинации сцепления шестерней в момент переключения передачи. Фрикционы пакета торможения — вещь уже распространённая, хотя появилась она не так давно, вместе с внедрением возможности регулировки тормозного усилия с помощью пропорциональных соленоидов PWM, VBS или VFS.
В более простых коробках рубежа 1990-2000 годов стояли обычные соленоиды, которые имели только два положения. Их так и называют on/off-соленоидами. Возможности регулировки усилия у них нет, и в таких коробках вместо пакета фрикционов торможения ставили обычные тормозные ленты, которые, охватывая барабан сверху, могли его останавливать. Для большинства скромных четырёхступенчатых АКПП такого механизма было достаточно: он проще и надёжнее, хотя по уровню “интеллекта” до тормозного барабана не дотягивает.
Их так и называют on/off-соленоидами. Возможности регулировки усилия у них нет, и в таких коробках вместо пакета фрикционов торможения ставили обычные тормозные ленты, которые, охватывая барабан сверху, могли его останавливать. Для большинства скромных четырёхступенчатых АКПП такого механизма было достаточно: он проще и надёжнее, хотя по уровню “интеллекта” до тормозного барабана не дотягивает.
Откроем секрет: в процессе диагностики мы выяснили, что причиной «пинков» при переключении АКПП (на Фокусе стоит фордовская коробка 4F27E) стал именно износ тормозной ленты Overdrive. Поэтому сегодня сфокусируемся на её замене.
Износ ленты приводит к тому, что переключение с первой на вторую и с третьей на четвёртую передачи сопровождается рывками, толчками, а запущенных случаях и вовсе становится невозможным. Почему именно эти передачи? Тут сейчас будет немного сложно.
Для включения третьей передачи пакет 3-4 зажимается , а тормозная лента отпускает барабан. То есть, износ ленты на включение третьей передачи никак не влияет.
То есть, износ ленты на включение третьей передачи никак не влияет.
А вот при включении второй передачи тормозная лента тормозит на корпус АКПП обойму барабана Reverse и стопорит солнечную шестерню задней планетарки. Если лента изношена, то торможение барабана запаздывает, что вызывает пробуксовку и толчок.
При включении четвёртой передачи солнечная шестерня той же задней планетарки стопорится лентой точно так же.
Ну, а при работе первой передачи барабан Reverse вообще вращается в обратную сторону и лента его, разумеется, не прижимает. Так что износ ленты заметен только при переключении на вторую или четвёртую передачи.
Теперь самое время перейти к практической части: немного разобрать коробку и поменять ленту. Но сначала напомним, где можно было встретить АКПП 4F27E (для Мазды эта коробка называлась FN4A-EL). Список автомобилей с этими автоматами обширен, назовём лишь наиболее популярные у нас автомобили. Это Ford Fiesta (2008-2011), Focus/Focus C-Max (2000-2011), Mazda 2 (2007-2011), 3 (2004-2011), 323 (2000-2007), 6 (2002-2008), Atenza/5HB/Wagon (2002-2005), Demio (2000-2011), Familia (2000-2005), MPV (2000-2007), Premacy (2000-2010), Tribute (2003-2008).
Бой с лентой
Начнём с самой элементарной операции: ослабим гайки переднего левого колеса, которое потом надо будем снять. Теперь открываем капот и лезем под него с головой. Тут мы вытаскиваем аккумуляторную батарею, её площадку и снимаем корпус воздушного фильтра. В этом нет ничего сложного.
Теперь домкратим машину и снимаем колесо. Я бы очень советовал не оставлять машину на домкрате, а воспользоваться подставкой: так будет надёжнее. Да и домкрат нам ещё пригодится. Но если нет ни подставки, ни сильного инстинкта самосохранения, можно оставить и так. Затем можно снять локер, чтобы открыть дальнейший доступ к коробке. Совсем его можно не демонтировать, а снять клипсы, стоящие прямо напротив АКПП, и отогнуть локер в сторону. Ставим под картер АКПП домкрат (не забываем положить какую-нибудь резинку или дощечку, если не хочется менять картер).
Ставим под картер АКПП домкрат (не забываем положить какую-нибудь резинку или дощечку, если не хочется менять картер).
Теперь нужно снять коробку с опоры. Тут, возможно, придётся немного помучиться. Некоторую долю мучений могут ликвидировать WD40, хорошие инструменты и развитая мускулатура рук.
Опора стоит прямо под корпусом воздушного фильтра. Своей формой она похожа на бабочку, так что иногда её называют этим нежным именем. На самом деле это мерзкая железка с резиновой подушкой, прикрученная четырьмя прикипевшими болтами. Теоретически, их можно не откручивать: они никак не мешают опустить коробку вниз. Но при опускании она смещается вперёд, а опора это делать мешает. Так что лучше повозиться с болтами.
Центральную гайку откручивать придётся обязательно — она как раз и держит АКПП на весу. Вроде, на силу не жалуюсь, но с ней пришлось воевать серьёзно. Впрочем, если у вас есть опыт откручивания закисших соединений, то справитесь. Действия стандартные: обработка WD40, простукивание, ключ с удлинителем из трубы… Но небольшой лайфхак есть: я смог стронуть гайку, разгрузив соединение поддомкрачиванием АКПП.
После того как опора снята, можно опускать коробку вниз. Делать это нужно до тех пор, пока не увидите все болты задней крышки коробки. Или хотя бы их большую часть (остальные можно открутить с карданчиком снизу или сверху обычным ключом). Главное, чтобы потом можно было вытащить из-за лонжерона крышку коробки.
Откручиваем девять болтов крышки, что сделать несложно, и снимаем крышку. Она сидит на герметике, так что сама не отвалится. Но и лупить по ней молотком тоже нельзя: можно сломать. Снизу у неё есть технологический выступ, за который крышку можно поддеть отвёрткой. При отсоединении крышки может вытечь немного масла, это нормально. А вот если его много — то есть проблема, о которой пару слов я скажу чуть ниже. Крышку снимать нужно осторожно, чтобы нечаянно не вытащить с ней барабан, который эта лента и охватывает.
Мы уже рассказывали, что натяжение ленты этой АКПП можно регулировать заменой регулировочного болта. Иногда при замене ленты его советуют выкручивать — дескать, он удерживает ленту. На самом деле его можно только ослабить, этот болт всего лишь упирается в посадочное место на ленте и вытащить её не мешает. Так что просто вытаскиваем ленту и разглядываем её ради детского любопытства.
На самом деле его можно только ослабить, этот болт всего лишь упирается в посадочное место на ленте и вытащить её не мешает. Так что просто вытаскиваем ленту и разглядываем её ради детского любопытства.
Заметить на глаз износ фрикционного слоя практически невозможно (если он ещё вообще остался). А вот излишнее замасливание ленты видно сразу. Откуда и зачем на ленте масло, если оно мешает ей выполнять прямую работу — тормозить барабан? За зажим ленты отвечает гидроцилиндр, шток которого упирается в посадочное место ленты напротив упорного болта. Со временем шток изнашивается и начинает пропускать масло. Критически давление обычно не падает, но замасливание заставляет барабан проскальзывать. Поэтому если масла слишком много, гидроцилиндр лучше тоже заменить. В нашем случае масла не так уж много, так что оставим всё как есть.
Вторая причина избыточного масла на ленте — дефект задней крышки АКПП. Особенно часто он проявляется на Маздах, где алгоритм работы немного отличается, и блокировка работает чуть жёстче. Да и крышка там сделана из более мягкого сплава, чем на коробках Фордов. Но на столь любимых нами первых и вторых Фокусах (и на других Фордах тоже) задняя крышка находится в зоне риска. Поэтому проверяем посадочное место тефлоновых колец. В нашем случае там всё прекрасно, но бывает, что паз, в котором сидит кольцо, стачивается. Начинаются пропуски масла, появляется недостаток давления, начинают гореть фрикционы и пропадают третья и четвёртая передачи.
Да и крышка там сделана из более мягкого сплава, чем на коробках Фордов. Но на столь любимых нами первых и вторых Фокусах (и на других Фордах тоже) задняя крышка находится в зоне риска. Поэтому проверяем посадочное место тефлоновых колец. В нашем случае там всё прекрасно, но бывает, что паз, в котором сидит кольцо, стачивается. Начинаются пропуски масла, появляется недостаток давления, начинают гореть фрикционы и пропадают третья и четвёртая передачи.
Ну, а нам остаётся только поставить на место новую ленту (вряд ли её можно поставить неправильно) и собрать всё в обратном порядке.
Что может пойти не так?
О том, что есть вероятность внезапной необходимости заменить гидроцилиндр и заднюю крышку, я уже сказал. Но есть ещё одна небольшая сложность.
Если кто-то из предыдущих владельцев уже вкручивал самый длинный из всех регулировочных болтов, после установки новой ленты могут возникнуть сложности с включением третьей или задней передач. В этом случае нужно поставить болт на полтора-два размера короче того, что стоит у вас. В крайнем случае — слегка (на 0,5 — 0,75 мм) подточить существующий.
В крайнем случае — слегка (на 0,5 — 0,75 мм) подточить существующий.
И, конечно же, не надо надеяться, что коробка со сгоревшими фрикционами и загаженным гидроблоком после замены ленты вдруг начнёт работать как положено. Но об этом мы поговорим как-нибудь другой раз.
Опрос
У вас когда-нибудь пиналась АКПП?
Всего голосов:
Где находится датчик скорости Toyota Windom. Где что у Авто?
Буквально вчера соседу по гаражу стало нужно выяснить, где находится датчик скорости Тайота Виндом в автомобиле. Не трудно было найти, в данном видео-ролике можно увидеть где расположен датчик скорости Тайота Виндом.
Комментарии к теме где находится датчик скорости Toyota Windom
Микалюк Михаил
Доброго времени суток. Говорю сразу в машине я не бум-бум, но стараюсь обучаться. Разобрал бензонасос, посмотрел, все в порядке на своих местах. Если проблема не в этом тогда в чем? заранее благодарен
Брандон
… катухи … чему людей учишь
Кумпан Лева
Да уж, посмотрел пару краш тестов этих китайских ‘авто’… Ужас, не дай бог листочек осенью упадёт, кап ремонт делать придётся…
Danel
Привет!
Хочу сказать что у тебя очень клёвый канал на YouTube! 🙂 Мне очень понравилось и я стал твоим подписчиком. Поэтому хочу предложить тебе простой и эффективный способ получать большую отдачу от своего канала – подключайся к медиасети!
Ты сможешь получать больший доход от рекламы и набрать больше подписчиков и просмотров, а также защитить авторские права на свои видео.
Я рекомендую выбрать медиасеть AIR. Это надежная и удобная партнёрка, с которой твой канал всегда будет расти и развиваться.
Подключайся к AIR вместе со мной: join.air.io now
Подробнее о партнерской сети AIR: youtu.be
Успехов!
Это надежная и удобная партнёрка, с которой твой канал всегда будет расти и развиваться.
Подключайся к AIR вместе со мной: join.air.io now
Подробнее о партнерской сети AIR: youtu.be
Успехов!
Гвин Асылзат
спосибо я постоянно пользуюсь Вашими советами…
Гришукина Нурзат
Спасибо удачи
Джейхун
добрый день у меня мазда 323 тяга плоха реска не тянет чё причина никто не нашол причина не знайте если знайте скажете пожалуйста спасибо
Дела
Спасибо и респект за информацию,очень познавательно
Люк
как получилось? сними видео как подробно ставить! надо ли укорачивать кардан или скрещивать с вазовским?
Augustus
ну ездил жэ на crv,все было в шокаладе
Лукашинский Эрик
нифига он проехал,я думал в км,а оказывается милях.
Леон
Не вращается вообше чем причина
Dakota
У меня тоже она разлеталась но без последствий
Стас Шепетун
Что за программа у телефона
Балтай Солькин
И как тебя током не треснуло)
Акку
Лучшим минивеном считаю Рено Эспейс
Лапетина Бая
я тебе както писал что на подём переставала тянуть, вылечил резист на фишку егр, но кажется расход больше стал или это из за морозов непойму
Назарий
Спасибо все толково. Взял у друга машину и заглох на трассе на приборке 0,5 бака а в реальности оказалось что он полностью сухой
Взял у друга машину и заглох на трассе на приборке 0,5 бака а в реальности оказалось что он полностью сухой
Федот
ребята скажите пожалуйста утром плохо заводится весной летом осенью зимой разница нету потом течения дня все хорошо фф1 дизель 2003 универсал дуратек мотор свечи накал новые аккумулятор новый 75 стартер хорошо работает что мне делать
Царук
Без сто грамм не понять… знатный вышел!
Сальваторе
Мне кажеться ты аутист?
Гульсара
Наиль! Родной подскажите помогите пожалуйста…Ваз 21099 двигатель 83ий 1.5 карб солекс. до поверхностной капиталки ДВС всё работало как часики, спасибо Вам и вашим видео. Но после сборки беда…колбасит на холостом и не отрегулировать его нормально… грешил на вакумник…но нет…главный симптом когда скидываешь провод с первой свечи ноль реакции, даже вроде ровней начинает работать… но при выкручивании свечи она не залита и не чёрная, а абсалютно нормальная рабочая свеча. ..куда копать подскажите. И самое главное нет тяги…на высоких оборотах и передачах…60км 4 передача двигатель ходуном…90км 4передача более менее на малых оборотах, только газку и всё опять ходуном про 5передачу вообще молчу…в общем езжу сейчас только на 3 передачах…там где раньше 4 спокойно в натяжку вытягивала, сейчас и третья бывает не справляется, приходиться до второй понижать… провод с датчика хх скидываю глохнет…
..куда копать подскажите. И самое главное нет тяги…на высоких оборотах и передачах…60км 4 передача двигатель ходуном…90км 4передача более менее на малых оборотах, только газку и всё опять ходуном про 5передачу вообще молчу…в общем езжу сейчас только на 3 передачах…там где раньше 4 спокойно в натяжку вытягивала, сейчас и третья бывает не справляется, приходиться до второй понижать… провод с датчика хх скидываю глохнет…
ЭБУ Форд Фокус 1 – где находится основные неисправности и способы ремонта
На автомобили Форд Фокус 1 европейского производства устанавливаются электронные блоки управления фирм FoMoCo, Bosch, Delphi, Continental, Magneti Marelli, TRW, Siemens, Visteon и т.д. Несмотря на многообразие неисправностей, всё же выделим наиболее встречаемые в ремонте и расскажем о способах их устранения.
ЭБУ Форд Фокус 1 – какие функции выполняетПо нашей статистике привозимых блоков в 80% случаев не требуется ремонт ЭБУ Ford Focus 1, т.
 к. диагностика была произведена неправильно. Проблема изначально кроется в проводке автомобиля
к. диагностика была произведена неправильно. Проблема изначально кроется в проводке автомобиляЭлектронный блок управления (ЭБУ) двигателем — это специализированный компьютер, который принимает сигналы от датчиков и выдает команды на исполнительные устройства.
Он выполняет следующие функции:
- управляет распределенным впрыском топлива в цилиндры, включает и выключает топливный насос;
- обеспечивает искробразование на свечах и корректирует угол опережения зажигания;
- управляет подачей воздуха при пуске двигателя;
- регулирует частоту вращения коленчатого вала на холостом ходу;
- управляет работой вентиляторов системы охлаждения двигателя;
- на автомобилях с кондиционером управляет включением и выключением компрессора, а также контролирует работу ряда устройств;
- на автомобилях с автоматической трансмиссией управляет коробкой передач.

Система состоит из электронного блока управления, датчиков и исполнительных устройств, соединительных проводов с разъемами. Датчики системы управления двигателем: синхронизации, положения распределительного вала, концентрации кислорода, массового расхода воздуха (либо датчик абсолютного давления и температуры воздуха на впуске), температуры охлаждающей жидкости, положения дроссельной заслонки, скорости движения автомобиля, сцепления, положения рычага выбора передачи.
Исполнительные устройства: электромагнитные форсунки; модуль зажигания; регулятор холостого хода; реле зажигания, стартера и топливного насоса; контрольная лампа неисправности двигателя на панели приборов; электромагнитный клапан продувки адсорбера; клапан системы рециркуляции отработавших газов.
В систему управления двигателем интегрирован иммобилайзер. Кроме того, выполнены соединения с электронным блоком управления АБС с противопробуксовочной системой и системой стабилизации траектории.
Кроме того, выполнены соединения с электронным блоком управления АБС с противопробуксовочной системой и системой стабилизации траектории.
Частой проблемой ЭБУ Ford Focus 1 является выход из строя электронных компонентов, которые управляют катушками зажигания.
В подавляющем большинстве случае это происходит вследствие выхода из строя самой катушки – при этом двигатель начинает троить, перестают работать 1 или более цилиндров. В результате по электронной диагностики в системе висят ошибки вида P030х опознаны перебои зажигания в цилиндре Х.
Причиной данной поломки является неисправная катушка зажигания, соответственно после замены на исправную ничего не меняется (также не помогает замена свечей, ВВ проводов и т.д.). Проблема конкретно в самом блоке управления. ЭБУ-Сервис произведет восстановление и устранит проблему по пропускам зажигания в одном или нескольких цилиндрах.
ЭБУ-Сервис произведет восстановление и устранит проблему по пропускам зажигания в одном или нескольких цилиндрах.
Отсутствует импульс с ECU на одну или несколько форсунок. Электронная диагностика дает ошибки в системе вида P021x (цепь управления форсункой цилиндра Х неисправна).
- Блок управления не выходит на связь.
- Ошибки по дроссельной заслонке в системе: P1122 (низкое напряжение в цепи привода дроссельной заслонки), P1126 (обрыв цепи управления реле привода дроссельной заслонки).
- Пропадают холостые обороты + плавают. Электрика в норме.
- и др.
Мы привели лишь основные проблемы и типовые случае, в реальности их намного больше.
Видео: Как прошить ЭБУ Форд Фокус 1Где находиться ЭБУ Форд Фокус 1Полезные советы по обслуживанию ЭБУ Форд Фокус 1Блок установлен на стойке под панелью приборов с правой стороны за вещевым ящиком.
 Чтобы двигатель автомобиля работал в оптимальном режиме, микропроцессор блока по специальной программе, хранящейся в памяти устройства, анализирует поступающую информацию и рассчитывает необходимые параметры сигналов для исполнительных устройств.
Чтобы двигатель автомобиля работал в оптимальном режиме, микропроцессор блока по специальной программе, хранящейся в памяти устройства, анализирует поступающую информацию и рассчитывает необходимые параметры сигналов для исполнительных устройств.Для того, чтобы продлить срок службы ЭБУ Форд Фокус 1 необходимо выполнить ряд рекомендации:
- внимательно следить за исправностью электрооборудования и основных узлов и агрегатов, которые управляются электронными блоками управления. В случае их некорректной работы – съездить на диагностику и оценить масштаб проблемы. Неисправные агрегаты со временем перенапрягают компонентную базу блоков управления, в итоге они выходят из строя (особенно часто это происходит на блоках управления АКПП и ABS/ESP)
- не забивать на проблемы с электрикой (что-то коротит и т. п.)
- не допускать попадания влаги и масла в ЭБУ
- при сильных морозах (особенно на дизелях) не пытаться отчаянно заводится на посаженном аккумуляторе
- не подключать блоки управления и электронные устройства завязанные на них при накинутых клеммах аккумулятора
- не давать лазить тем, кто в них не разбирается
 п.)
п.)Соблюдая эти нехитрые меры предосторожности вы существенно сократите вероятность столкновения с проблемами по электронным блокам.
Пошаговая инструкция замены ЭБУ Форд Фокус 1Для того, чтобы снять ЭБУ на автомобиле Форд Фокус 1 необходимо выполнить следующий порядок действий:
- Для снятия блока управления выключаем зажигание и отсоединяем клемму «минусового» провода от аккумуляторной батареи. Снимаем обивку правой боковой панели и, для удобства работы, вещевой ящик
- Электронный блок управления установлен в пластмассовом кронштейне под блоком центрального замка (для наглядности панель приборов снята)
- Соединительная колодка проводов притянута к блоку управления болтом.
- Головкой «на 10» отворачиваем болт и отсоединяем колодку.
- Вынимаем пластмассовую дистанционную втулку.
- Выдвигаем блок из кронштейна и снимаем его.

Видео: Обзор проводки ЭБУ Форд Фокус 1Если при замене ЭБУ на автомобиле Форд Фокус 1 донор такой же марки и серии, то в большинстве случаев перепрашивать его не надо.
Как заменить датчик скорости передачи
У каждого транспортного средства, которое мы ведем, должен быть какой-то способ определения скорости движения во время движения. Датчики скорости трансмиссии предназначены для точного расчета скорости движения через выходной вал трансмиссии. Датчик очень точен для стандартного автомобильного оборудования от производителя.
Датчик очень точен для стандартного автомобильного оборудования от производителя.
Если у вашего автомобиля шины меньшего размера, чем обычно, скорость движения будет вычисляться по более высокой скорости, даже если вы едете медленнее.Это связано с более быстрым вращением выходного вала. Если у вашего автомобиля шины большего размера, чем обычно, скорость движения будет рассчитываться с меньшей скоростью. В этом случае, даже если вы едете на предельной скорости, вы будете обгонять другие транспортные средства.
Световые коды двигателя для датчиков скорости трансмиссии:
Неисправный датчик скорости трансмиссии может вызвать загорание лампы двигателя. Некоторые датчики скорости трансмиссии приводятся в действие шестерней, что делает их похожими на регулятор, однако большинство датчиков скорости представляют собой магниты, которые изменяют сигнал при вращении выходного вала.
Выходной вал имеет шпоночную конструкцию на валу. Блок вращается вместе с валом, и каждая шпонка проходит над магнитом датчика. Когда магнит указывает на измеримое сопротивление металла, он посылает на компьютер некоторое напряжение. Когда на магнит попадает слишком много металлических частиц или если магнит теряет свой магнетизм, датчик перестает работать. Иногда датчик выходит из строя, если он погружен в масло другого типа, отличного от рекомендованного, из-за вязкости.
Когда магнит указывает на измеримое сопротивление металла, он посылает на компьютер некоторое напряжение. Когда на магнит попадает слишком много металлических частиц или если магнит теряет свой магнетизм, датчик перестает работать. Иногда датчик выходит из строя, если он погружен в масло другого типа, отличного от рекомендованного, из-за вязкости.
Признаками неисправности датчика скорости трансмиссии являются:
Если вы управляете транспортным средством, и спидометр ничего не регистрирует, или если спидометр начинает двигаться после движения транспортного средства, то датчик скорости трансмиссии вышел из строя.
Если магнит оторвется от датчика скорости, он попадет в трансмиссию, издав скрежет.
В зависимости от того, как датчик вышел из строя, загорится индикатор двигателя, информируя водителя о проблеме.
Часть 1 из 6: Проверить состояние датчика скорости трансмиссии
Необходимый материал
Шаг 1: Включите зажигание и запустите двигатель . Обведите автомобиль вокруг блока, чтобы проверить, будет ли работать спидометр.
Обведите автомобиль вокруг блока, чтобы проверить, будет ли работать спидометр.
Шаг 2: Проверьте под автомобилем . Возвращаясь с тест-драйва, возьмите фонарик и пройдите под автомобиль. Найдите датчик скорости трансмиссии и проверьте, прикреплен ли и закреплен ли ремень.
Часть 2 из 6: Подготовка автомобиля
Необходимые материалы
Шаг 1. Припаркуйте автомобиль на ровной твердой поверхности . Убедитесь, что трансмиссия находится в парковочном режиме (для автоматов) или на 1 передаче (для механических коробок передач).
Шаг 2: Закрепите колеса .Установите противооткатные упоры вокруг шин, которые останутся на земле. В этом случае установите противооткатные упоры вокруг передних колес, так как задняя часть автомобиля будет приподнята.
Включите стояночный тормоз, чтобы заблокировать движение задних колес.
Шаг 3: Установите устройство для экономии заряда батареи на 9 В в прикуриватель . Это сохранит работоспособность вашего компьютера и сохранит текущие настройки в автомобиле. Если у вас нет устройства энергосбережения на девять вольт, вы можете пропустить этот шаг.
Это сохранит работоспособность вашего компьютера и сохранит текущие настройки в автомобиле. Если у вас нет устройства энергосбережения на девять вольт, вы можете пропустить этот шаг.
Шаг 4: Отсоедините аккумулятор . Откройте капот автомобиля и отсоедините аккумулятор автомобиля. Снимите заземляющий кабель с отрицательного полюса аккумуляторной батареи, чтобы отключить питание системы зажигания и топливной системы.
- Примечание : Важно защитить руки. Обязательно наденьте защитные перчатки, прежде чем снимать какие-либо клеммы аккумулятора.
Шаг 5: Поднимите автомобиль . Используя напольный домкрат, рекомендованный для веса автомобиля, поднимите его в указанных точках, пока колеса полностью не оторвутся от земли.
- Примечание : Всегда лучше следовать рекомендациям, данным в руководстве по эксплуатации вашего автомобиля, и использовать домкрат в точках, подходящих для вашего автомобиля.

Шаг 6: Установите опоры домкрата . Стойки домкрата должны заходить под места поддомкрачивания. Затем опустите автомобиль на опоры домкрата.
- Совет : В большинстве современных автомобилей точки поддомкрачивания опор для домкратов будут на сварном шве прямо под дверями вдоль днища автомобиля.
Часть 3 из 6: Снять датчик скорости трансмиссии
Шаг 1. Соблюдайте меры безопасности . Наденьте защитную одежду, маслостойкие перчатки и защитные очки.
Шаг 2: Возьмите для работы гусеницу, фонарик и инструменты. . Сдвиньте под автомобилем и найдите датчик скорости трансмиссии.
Шаг 3: Поместите поддон под коробку передач . Возьмите поддон и поместите его под корпус выходного вала коробки передач, где находится датчик скорости.
Шаг 4: Снимите крепежные болты . Отверните болты крепления датчика скорости. Отсоедините жгут от датчика.
- Примечание : Монтажные болты, которыми приводной вал крепится к задней оси, могут иметь шестигранные, шестигранные или звездообразные головки.
Шаг 5: Используйте отвертку с плоским жалом и извлеките датчик . Имейте в виду, что при ее снятии вытечет около одной литра трансмиссионной жидкости.
- Примечание : Датчик скорости трансмиссии расположен в задней части трансмиссии с продольной опорой.У трансмиссий датчик скорости расположен на длинной стороне выходного вала. Это будет конец коробки передач, обращенный к передней части двигателя.
Часть 4 из 6: Установите новый датчик скорости трансмиссии
Шаг 1: Установите новый датчик . Убедитесь, что новое уплотнительное кольцо установлено на новом датчике скорости трансмиссии. Установите новый датчик в корпус выходного вала. Подсоедините жгут к датчику.
Шаг 2: Вкрутите монтажные болты . Затяните болты вручную и добавьте еще 1/8 оборота.
Затяните болты вручную и добавьте еще 1/8 оборота.
- Примечание : Не затягивайте крепежные болты слишком сильно, иначе датчик треснет.
Шаг 3: Залейте трансмиссионное масло . Откройте капот вашего автомобиля. Снимите щуп или пробку трансмиссионного масла. Возьмите воронку и добавьте одну литр трансмиссионного масла или то количество, которое было слито из трансмиссии во время снятия датчика.
Часть 5 из 6: Подключите аккумулятор и опустите автомобиль
Шаг 1: Подключите аккумулятор .Откройте капот автомобиля. Снова подсоедините заземляющий кабель к отрицательной клемме аккумуляторной батареи.
Выньте девятивольтный аккумулятор из прикуривателя.
Затяните зажим аккумулятора, чтобы убедиться в хорошем соединении.
- Примечание : Если вы не использовали девятивольтовую батарею, вам придется сбросить все настройки в вашем автомобиле, такие как радио, электрические сиденья и электрические зеркала. Если вы использовали девятивольтовую батарею, вам нужно будет очистить коды двигателя, если они есть, перед запуском автомобиля.
 Если вы использовали девятивольтовую батарею, вам нужно будет очистить коды двигателя, если они есть, перед запуском автомобиля.
Если вы использовали девятивольтовую батарею, вам нужно будет очистить коды двигателя, если они есть, перед запуском автомобиля.Шаг 2: Уберите инструменты . Соберите все инструменты и вашу лиану и уберите их с дороги.
Шаг 3: Поднимите автомобиль . Используя напольный домкрат, рекомендуемый для веса автомобиля, поднимите его под автомобилем в указанных точках, пока колеса полностью не оторвутся от земли.
Шаг 4: Снимите опоры домкрата . Снимите опоры домкрата и держите их подальше от автомобиля.
Шаг 5: Опустите автомобиль .Опустите автомобиль так, чтобы все четыре колеса были на земле. Вытащите домкрат и отложите его в сторону.
Шаг 6: Снимите противооткатные упоры . Снимите противооткатные упоры с задних колес и отложите их в сторону.
Часть 6 из 6: Тест-драйв автомобиля
Необходимый материал
Шаг 1: Объехать на автомобиле квартал . Пока вы едете, проверьте, загорелся ли снова индикатор двигателя. Следите за спидометром, чтобы увидеть, регистрирует ли он движение автомобиля.
Пока вы едете, проверьте, загорелся ли снова индикатор двигателя. Следите за спидометром, чтобы увидеть, регистрирует ли он движение автомобиля.
Шаг 2: Проверить на утечки масла . Когда вы закончите тест-драйв, возьмите фонарик и посмотрите под автомобилем, нет ли утечки масла.
Посмотрите на датчик скорости трансмиссии на наличие признаков утечки масла. Также убедитесь, что привязь все еще прикреплена.
Если ваш автомобиль не регистрирует скорость даже после замены датчика скорости трансмиссии, может потребоваться дальнейшая диагностика датчика скорости.
Если проблема не исчезнет, вам следует обратиться за помощью к одному из сертифицированных технических специалистов YourMechanic и проверить раздаточную коробку.
Патент США на датчик шероховатости Патент (Патент № 4092955 выдан 6 июня 1978 г.)
ОБЛАСТЬ ИЗОБРЕТЕНИЯ Настоящее изобретение относится к средствам датчика шероховатости, обнаруживающим и измеряющим изменения скорости двигателя от цикла к циклу для получения скорости сигнала шероховатости, нормализованной для мгновенной скорости двигателя.
Датчики шероховатости типа, описанного в патентах США №
. №3,789,816, выпущенные февр.5, 1974, Taplin et al. о «Системе контроля шероховатости двигателя внутреннего сгорания с ограничением обедненной смеси» и 3 872 846, выпущенном 25 марта 1975 г. Taplin et al. в «Системе контроля шероховатости двигателя внутреннего сгорания с рециркуляцией выхлопных газов», описания таких патентов, явным образом включенных в настоящий документ посредством ссылки, обеспечивают сигнал шероховатости, величина которого изменяется с изменениями скорости двигателя на протяжении многих циклов двигателя и, следовательно, отстает от фактического изменения оборотов двигателя. Кроме того, такие датчики предшествующего уровня техники требуют фильтрации и дифференцирования сигнала скорости для получения сигнала шероховатости в форме производных скорости первого и / или более высокого порядка.Дифференцирование было необходимо для создания сигнала изменения скорости, а фильтрация была необходима для отделения вызванных водителем и, следовательно, более медленных изменений скорости двигателя. Наконец, сигналы шероховатости, разработанные эталонными датчиками предшествующего уровня техники, не были нормализованы для частоты вращения двигателя, так что сигнал шероховатости заданной величины при низкой частоте вращения двигателя и сигнал шероховатости такой же величины при высокой частоте вращения двигателя вызывают устройство использования шероховатости. чтобы произвести тот же ответ.Датчики шероховатости предшествующего уровня техники требуют учета различий между двигателями, а также шума двигателя и условий окружающей среды.
Наконец, сигналы шероховатости, разработанные эталонными датчиками предшествующего уровня техники, не были нормализованы для частоты вращения двигателя, так что сигнал шероховатости заданной величины при низкой частоте вращения двигателя и сигнал шероховатости такой же величины при высокой частоте вращения двигателя вызывают устройство использования шероховатости. чтобы произвести тот же ответ.Датчики шероховатости предшествующего уровня техники требуют учета различий между двигателями, а также шума двигателя и условий окружающей среды.
Желательно обеспечить датчик шероховатости двигателя, который обнаруживает изменения скорости двигателя от цикла к циклу, которые могут быть вызваны изменениями давления сгорания от цикла к циклу. Также желательно предоставить такой датчик шероховатости от цикла к циклу, который выдает сигнал шероховатости от цикла к циклу для того факта, что одно и то же изменение скорости двигателя на скорости с высокой скоростью двигателя и с низкой скоростью двигателя не представляет такая же величина шероховатости двигателя. Кроме того, желательно обеспечить сигнал шероховатости двигателя от цикла к циклу с использованием сигнала скорости, уже сгенерированного для других целей управления двигателем с обратной связью.
Кроме того, желательно обеспечить сигнал шероховатости двигателя от цикла к циклу с использованием сигнала скорости, уже сгенерированного для других целей управления двигателем с обратной связью.
Как далее описано в моем обычно назначаемом патенте США No. № 3734068, выданный 22 мая 1973 г. и озаглавленный «Система управления впрыском топлива», и другие связанные с ним патенты, включая патент США № В патенте США № 3
 Следовательно, для датчиков шероховатости могут использоваться те же триггерные импульсы, которые используются в моих вышеупомянутых патентах для корректировки ширины импульса впрыска топлива для межцикловых изменений скорости двигателя. ОБЪЕКТОВ
Следовательно, для датчиков шероховатости могут использоваться те же триггерные импульсы, которые используются в моих вышеупомянутых патентах для корректировки ширины импульса впрыска топлива для межцикловых изменений скорости двигателя. ОБЪЕКТОВ Таким образом, основной задачей настоящего изобретения является создание нового и улучшенного датчика шероховатости двигателя.
Другой целью настоящего изобретения является создание датчика двигателя, реагирующего на межцикловые изменения скорости двигателя.
Еще одной целью настоящего изобретения является создание датчика шероховатости вышеупомянутого типа, который может быть реализован либо аналоговыми, либо цифровыми методами.
Еще одной задачей настоящего изобретения является создание датчика шероховатости вышеупомянутого типа, в котором основной входной сигнал для датчика шероховатости представляет собой тот же импульсный сигнал, который используется одно- и / или многоточечной системой впрыска топлива для управления шириной импульса впрыска топлива.
Другой основной задачей настоящего изобретения является создание датчика шероховатости, вырабатывающего сигнал шероховатости, нормализованный для фактических оборотов двигателя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ Датчик шероховатости для измерения снижения частоты вращения двигателя от цикла к циклу содержит средство перекидного механизма, реагирующего на события двигателя, для управления альтернативным накоплением и последующим обратным отсчетом содержимого в первое средство хранения одновременно с альтернативным обратным отсчетом и накоплением. загрузку содержимого во второе средство хранения.Средство хранения питает соответствующие первый и второй компараторы, которые создают соответствующие первый и второй выходные выходные импульсы, ширина которых определяется интервалом между временем, когда соответствующее средство хранения отсчитывается до его начального значения, и временем следующего триггерного перехода . Необработанный выходной импульс шероховатости в форме только одного, но не обоих или ни одного выходных импульсов компаратора передается с помощью логического средства исключающего ИЛИ к средству нормализации скорости, которое также принимает содержимое средства хранения, противоположное тому, которое производит исходный импульс шероховатости. Средство нормализации скорости вырабатывает сигнал шероховатости, нормализованный по скорости, величина которого изменяется обратно пропорционально величине только того содержимого противоположного средства хранения, которое подсчитывается в течение длительности необработанного импульса шероховатости.
Средство нормализации скорости вырабатывает сигнал шероховатости, нормализованный по скорости, величина которого изменяется обратно пропорционально величине только того содержимого противоположного средства хранения, которое подсчитывается в течение длительности необработанного импульса шероховатости.
Эти и другие цели и особенности настоящего изобретения станут более очевидными из следующего описания, взятого вместе со следующими фигурами, на которых:
РИС. 1 представляет собой изображение частично в виде блок-схемы и частично в виде схемы датчика шероховатости согласно настоящему изобретению;
РИС.2 иллюстрирует формы сигналов, создаваемые некоторыми элементами, показанными на фиг. 1, а также выходы двух триггеров FF2 и FF3, показанных на фиг. 3; и
РИС. 3 – электрическая схема датчика шероховатости по фиг. 1.
БЛОК-СХЕМА ОПИСАНИЕ Теперь обратимся к блок-схеме изобретения, показанной на фиг. 1, и формы сигналов, полученные в связи с этим, показанные на фиг. 2 показан подходящий датчик 10 частоты вращения двигателя в виде спускового крючка с приводом от коленчатого вала двигателя, который приводится в действие обычным распределителем и содержит его часть.Также можно использовать импульсные сигналы, индуцированные первичной обмоткой зажигания. Датчик 10 частоты вращения двигателя генерирует последовательности последовательных запускающих импульсов TG1 и TG2, зависящих от частоты вращения двигателя. Эти запускающие импульсы TG1 и TG2 подаются в качестве входных сигналов к первому триггеру 20, генерирующему дополнительные выходные сигналы FF1 и FF1 *, каждый из которых имеет интервал или продолжительность, изменяющуюся в зависимости от мгновенной скорости двигателя.
1, и формы сигналов, полученные в связи с этим, показанные на фиг. 2 показан подходящий датчик 10 частоты вращения двигателя в виде спускового крючка с приводом от коленчатого вала двигателя, который приводится в действие обычным распределителем и содержит его часть.Также можно использовать импульсные сигналы, индуцированные первичной обмоткой зажигания. Датчик 10 частоты вращения двигателя генерирует последовательности последовательных запускающих импульсов TG1 и TG2, зависящих от частоты вращения двигателя. Эти запускающие импульсы TG1 и TG2 подаются в качестве входных сигналов к первому триггеру 20, генерирующему дополнительные выходные сигналы FF1 и FF1 *, каждый из которых имеет интервал или продолжительность, изменяющуюся в зависимости от мгновенной скорости двигателя.
Дополнительные выходы FF1 и FF1 * первого триггера 20 используются для управления схемой 30 переключения, чтобы поочередно подключать зависящее от времени управление обратным отсчетом в форме источника 40 тока с одним из двух хранилищ переменных содержимого. устройства в виде конденсаторов С.sub A или C B при одновременном подключении зависящего от времени управления обратным отсчетом в виде стока 50 тока к другому из двух конденсаторов C A или C B. В течение заданного интервала FF1 переключающая схема таким образом подключает источник 40 тока к зарядному конденсатору C A, чтобы генерировать на нем счетную или возрастающую часть составляющего напряжения V CA, начиная с сброса. уровень V.sub.RA. Одновременно переключающая схема 30 также соединяет сток 50 тока с разрядным конденсатором C.sub B, чтобы генерировать на нем обратный отсчет или часть с понижением напряжения V CB. Во время последующего интервала FF1 * переключающая схема 30 соединяет сток 50 тока с разрядным конденсатором CA, чтобы генерировать часть напряжения VCA с обратным отсчетом или с понижением частоты и одновременно подключать источник тока. 40, чтобы заряжать конденсатор C B для создания на нем счетной или нарастающей части напряжения V CB, начиная с уровня сброса V RB.
устройства в виде конденсаторов С.sub A или C B при одновременном подключении зависящего от времени управления обратным отсчетом в виде стока 50 тока к другому из двух конденсаторов C A или C B. В течение заданного интервала FF1 переключающая схема таким образом подключает источник 40 тока к зарядному конденсатору C A, чтобы генерировать на нем счетную или возрастающую часть составляющего напряжения V CA, начиная с сброса. уровень V.sub.RA. Одновременно переключающая схема 30 также соединяет сток 50 тока с разрядным конденсатором C.sub B, чтобы генерировать на нем обратный отсчет или часть с понижением напряжения V CB. Во время последующего интервала FF1 * переключающая схема 30 соединяет сток 50 тока с разрядным конденсатором CA, чтобы генерировать часть напряжения VCA с обратным отсчетом или с понижением частоты и одновременно подключать источник тока. 40, чтобы заряжать конденсатор C B для создания на нем счетной или нарастающей части напряжения V CB, начиная с уровня сброса V RB.
Незаземленная клемма конденсатора C. sub.A применяется как один вход к первому компаратору 60, а незаземленный вывод конденсатора CB аналогичным образом применяется как один вход ко второму компаратору 70. Второй вход к каждому из первого и второго компараторов 60 и 70 – это опорное напряжение, выбранное таким образом, чтобы при постоянных оборотах двигателя, где интервал FF1 совпадает с непрерывным интервалом FF1 *, интервал подъема от уровня запуска или сброса до пикового значения соответствует интервалу спада от пикового значения до уровень благоговения.Таким образом, скорость зарядки источника 40 тока может быть выбрана так, чтобы она не обязательно соответствовала скорости разряда стока 50 тока.
sub.A применяется как один вход к первому компаратору 60, а незаземленный вывод конденсатора CB аналогичным образом применяется как один вход ко второму компаратору 70. Второй вход к каждому из первого и второго компараторов 60 и 70 – это опорное напряжение, выбранное таким образом, чтобы при постоянных оборотах двигателя, где интервал FF1 совпадает с непрерывным интервалом FF1 *, интервал подъема от уровня запуска или сброса до пикового значения соответствует интервалу спада от пикового значения до уровень благоговения.Таким образом, скорость зарядки источника 40 тока может быть выбрана так, чтобы она не обязательно соответствовала скорости разряда стока 50 тока.
Каждый из компараторов 60 и 70 работает для создания выходного сигнала A или B соответственно только до тех пор, пока напряжение на соответствующих конденсаторах CA или CB ниже соответствующего опорного напряжения, такой сброс опорного значения поэтому уровень выбирается таким образом, чтобы он был выше полностью разряженного уровня конденсаторов. Таким образом, компараторы 60 и 70 выдают выходной сигнал только тогда, когда двигатель замедляется, потому что тогда заданный интервал FF1 или FF1 * длиннее, чем предыдущий непрерывный интервал FF1 * или FF1.В этих условиях заряд или содержимое, накопленное на конкретном конденсаторе C A или C B в течение интервала FF1, разряжается ниже контрольного уровня до конца непрерывного интервала FF1 *, тем самым оставляя время до сброс конденсатора, соответствующий длительности A или B. С другой стороны, если двигатель ускоряется так, что каждый интервал FF1 или FF1 * короче, чем предыдущий непрерывный интервал FF1 * или FF1, содержимое заряда сохраняется на конденсаторе C .sub.A или C.sub.B в течение одного интервала FF1 не разряжается ниже контрольного уровня во время смежного интервала FF1 *, тем самым не позволяя соответствующему компаратору A или B производить выходной сигнал.
Таким образом, компараторы 60 и 70 выдают выходной сигнал только тогда, когда двигатель замедляется, потому что тогда заданный интервал FF1 или FF1 * длиннее, чем предыдущий непрерывный интервал FF1 * или FF1.В этих условиях заряд или содержимое, накопленное на конкретном конденсаторе C A или C B в течение интервала FF1, разряжается ниже контрольного уровня до конца непрерывного интервала FF1 *, тем самым оставляя время до сброс конденсатора, соответствующий длительности A или B. С другой стороны, если двигатель ускоряется так, что каждый интервал FF1 или FF1 * короче, чем предыдущий непрерывный интервал FF1 * или FF1, содержимое заряда сохраняется на конденсаторе C .sub.A или C.sub.B в течение одного интервала FF1 не разряжается ниже контрольного уровня во время смежного интервала FF1 *, тем самым не позволяя соответствующему компаратору A или B производить выходной сигнал.
Однако, поскольку датчик шероховатости по настоящему изобретению разработан для определения шероховатости двигателя, вызванной, в первую очередь, межцикловым замедлением, а не длительным замедлением, вызванным водителем, например, более 20 циклов или более, выходы A и B датчика компараторы 60 и 70 обрабатываются логической схемой 80 исключающего ИЛИ, которая определяет наличие в смежных интервалах только одного или другого из выходов A или B, но не одного или обоих, такая функция также известна как «кольцо-ИЛИ» Функция с учетом логического выражения A. sym.B с кольцом вокруг логического +, обозначающего функцию ИЛИ.
sym.B с кольцом вокруг логического +, обозначающего функцию ИЛИ.
Длительность выходного импульса A или B, передаваемого логикой 80 «исключающее ИЛИ», является приблизительной мерой шероховатости двигателя. Однако заданная продолжительность A или B на низких оборотах двигателя представляет большую шероховатость, чем такая же длительность A или B при более высоких оборотах двигателя (т. Е. Мгновенное замедление на 30 об / мин при 600 об / мин более грубое, чем 30 об / мин при 3000 об / мин, поскольку первое – изменение на 5%, второе – на изменение на 1%). Следовательно, исходные выходные данные шероховатости A или B «нормализуются» для фактических оборотов двигателя, так что заданные конечные выходные данные шероховатости на любой скорости представляют примерно такой же процент замедления двигателя.
Нормализация осуществляется схемой 90 нормализации скорости, которая заряжает конденсатор нормализации скорости C N в течение выходного импульса A или B от схемы 80 исключающего ИЛИ со скоростью, обратно пропорциональной одному из линейных напряжений V. CA и V CB на конденсаторах C A и C B. Поскольку величины таких линейных напряжений изменяются обратно пропорционально частоте вращения двигателя, схема 90 нормализации скорости, таким образом, воздействует на больший заряд конденсатора C нормализации скорости.N для заданной продолжительности A или B при более высоких оборотах двигателя, чем на более низких оборотах двигателя. Таким образом, схема аппроксимирует уравнение [FF1-FF1 *] / FF1, где [FF1-FF1:] представляет собой абсолютную разницу между любыми двумя смежными интервалами FF1 и FF1 *, а FF1 (или FF1 *) представляет продолжительность FF1 ( или FF1 *), соответствующий интервалу FF1 в [FF1-FF1 *].
CA и V CB на конденсаторах C A и C B. Поскольку величины таких линейных напряжений изменяются обратно пропорционально частоте вращения двигателя, схема 90 нормализации скорости, таким образом, воздействует на больший заряд конденсатора C нормализации скорости.N для заданной продолжительности A или B при более высоких оборотах двигателя, чем на более низких оборотах двигателя. Таким образом, схема аппроксимирует уравнение [FF1-FF1 *] / FF1, где [FF1-FF1:] представляет собой абсолютную разницу между любыми двумя смежными интервалами FF1 и FF1 *, а FF1 (или FF1 *) представляет продолжительность FF1 ( или FF1 *), соответствующий интервалу FF1 в [FF1-FF1 *].
Конденсаторы CA, CB и CN, каждый, подключены к схеме 100 сброса, которая управляется дополнительными выходами FF1 и FF1 * триггера 20 для сброса каждого из конденсаторов C.sub.A, C.sub. и C.sub.
Чтобы сохранить заряд, накопленный на конденсаторе нормализации скорости, для последующей обработки, схема 120 передачи заряда активируется длительностью или спадом выхода A или B логической схемы 80 исключающего ИЛИ для передачи заряда конденсатору нормализации скорости C N в накопительный конденсатор C R для шероховатости. Сигнал накопительного конденсатора C R шероховатости применяется для управления подходящим устройством 120 управления двигателем, таким как контроллер воздушно-топливного отношения, как раскрыто в цитируемом выше патенте Taplin ‘816, или контроллер рециркуляции выхлопных газов, как раскрыто в цитируемый выше патент Taplin ‘846.
Сигнал накопительного конденсатора C R шероховатости применяется для управления подходящим устройством 120 управления двигателем, таким как контроллер воздушно-топливного отношения, как раскрыто в цитируемом выше патенте Taplin ‘816, или контроллер рециркуляции выхлопных газов, как раскрыто в цитируемый выше патент Taplin ‘846.
Как можно лучше понять со ссылкой на фиг. 3, схема 30 переключения содержит пару PNP-транзисторов Q1 и Q2 и пару NPN-транзисторов Q3 и Q4. Базы транзисторов Q1 и Q3 соединены с выходом FF1 триггера 20 парой резисторов связи R1 и R3 соответственно, а базы транзисторов Q2 и Q4 соединены с выходом FF1 * триггера 20 парой резисторов связи R2 и R4 соответственно.Коллекторы транзисторов Q1 и Q3 обычно подключаются к незаземленной клемме конденсатора C A, а коллекторы транзисторов Q2 и Q4 обычно подключаются к незаземленной клемме конденсатора C B.
Источник тока 40 содержит PNP-транзистор Q5, база которого обычно подключена к коллекторам переключающих транзисторов Q1 и Q2. Эмиттер транзистора Q5 источника тока соединен резистором R7 установки скорости заряда с подходящим источником B +, а база транзистора Q5 подключена к узлу пары резисторов смещения деления напряжения R5 и R6, соединенных последовательно между B +. и земля.
Потребитель тока 50 содержит NPN-транзистор Q6, имеющий коллектор, обычно подключенный к эмиттерам переключающих транзисторов Q3 и Q4. Эмиттер транзистора Q6 стока тока заземлен через резистор R10, задающий скорость разряда, а база Q6 подключена к узлу пары резисторов R8 и R9 деления напряжения смещения базы, соединенных последовательно между B + и землей.
При предполагаемых условиях, что выход FF1 триггера 20 изначально ВЫСОКИЙ, так что его выход FF1 * имеет НИЗКИЙ уровень, транзистор Q1 выключен, а Q3 включен, так что конденсатор C.sub.A разряжается через путь, содержащий переход коллектор-эмиттер транзистора Q3, переход коллектор-эмиттер Q6 и транзистор R10 для установки скорости разряда. При одних и тех же начальных условиях транзистор Q2 включен, а транзистор Q4 выключен, так что конденсатор C B разряжается через путь, содержащий резистор R7, устанавливающий скорость заряда, переход эмиттер-коллектор транзистора Q5 и эмиттер. -коллекторный переход транзистора Q2.
При одних и тех же начальных условиях транзистор Q2 включен, а транзистор Q4 выключен, так что конденсатор C B разряжается через путь, содержащий резистор R7, устанавливающий скорость заряда, переход эмиттер-коллектор транзистора Q5 и эмиттер. -коллекторный переход транзистора Q2.
В конце заданного интервала FF1, длина или продолжительность которого изменяется обратно пропорционально частоте вращения двигателя, триггер 20 меняет состояние так, что его выходной сигнал FF1 является НИЗКИМ, а его выходной сигнал FF1 * – ВЫСОКИМ.переключающий транзистор Q1 затем включается, а Q3 выключается, так что конденсатор C A заряжается через путь, содержащий резистор R7 для установки скорости заряда, переход эмиттер-коллектор Q5 и переход эмиттер-коллектор. Q1. Одновременно конденсатор C B разряжается по пути, содержащему переход коллектор-эмиттер транзистора Q4, переход коллектор-эмиттер Q6 и резистор R10, устанавливающий скорость разряда.
Чтобы можно было определить разницу между длительностью данного интервала FF1 или FF1 * и непрерывного, предшествующего или последующего, интервала FF1 * или FF1, время увеличения заряда на данном конденсаторе должно быть заранее определено с учетом время уменьшения заряда на них для равных смежных интервалов FF1 и FF1 *. В настоящем варианте осуществления компоненты, содержащие источник 40 тока и приемник 50 тока, выбираются для обеспечения равных по величине зарядных и разрядных токов для обеспечения равного времени для равных смежных интервалов FF1 и FF1 * для зарядки конденсатора с заданного уровня сброса до максимум и обратно к соответствующему опорному уровню порога компаратора. Конечно, для специалиста в данной области техники будет очевидно, что можно легко использовать другие средства для осуществления заданного соотношения между временами увеличения и уменьшения заряженного содержимого на конденсаторе.Например, время зарядки и разрядки может быть уравновешено для неравных токов зарядки и разрядки путем соответствующего изменения уровней сброса и / или пороговых значений для достижения желаемого заранее определенного увеличения и уменьшения временного отношения.
В настоящем варианте осуществления компоненты, содержащие источник 40 тока и приемник 50 тока, выбираются для обеспечения равных по величине зарядных и разрядных токов для обеспечения равного времени для равных смежных интервалов FF1 и FF1 * для зарядки конденсатора с заданного уровня сброса до максимум и обратно к соответствующему опорному уровню порога компаратора. Конечно, для специалиста в данной области техники будет очевидно, что можно легко использовать другие средства для осуществления заданного соотношения между временами увеличения и уменьшения заряженного содержимого на конденсаторе.Например, время зарядки и разрядки может быть уравновешено для неравных токов зарядки и разрядки путем соответствующего изменения уровней сброса и / или пороговых значений для достижения желаемого заранее определенного увеличения и уменьшения временного отношения.
Компараторы 60 и 70 представляют собой обычные устройства, каждое из которых содержит пару дифференциально подключенных транзисторов и выходной транзистор. Компаратор 60, таким образом, содержит пару NPN-транзисторов Q10 и Q11, эмиттеры которых обычно связаны с землей через реферирующий резистор R13.База Q11 подключена к незаземленному выводу конденсатора CA, а база Q10 подключена к узлу пары опорных резисторов деления напряжения R11 и R12, соединенных последовательно между B + и землей. Коллектор Q10 подключен к базе Q12, а коллектор Q11 подключен к B +. Аналогично для компаратора 70, NPN-транзисторы Q13 и Q14 подключены по-разному, чтобы их совместно подключенные эмиттеры были привязаны к земле через реферирующий резистор R14. База Q13 подключена к незаземленной клемме конденсатора C.sub.B, а база Q14 подключена к узлу между резисторами деления напряжения R15 и R16, соединенными последовательно между B + и землей.
Компаратор 60, таким образом, содержит пару NPN-транзисторов Q10 и Q11, эмиттеры которых обычно связаны с землей через реферирующий резистор R13.База Q11 подключена к незаземленному выводу конденсатора CA, а база Q10 подключена к узлу пары опорных резисторов деления напряжения R11 и R12, соединенных последовательно между B + и землей. Коллектор Q10 подключен к базе Q12, а коллектор Q11 подключен к B +. Аналогично для компаратора 70, NPN-транзисторы Q13 и Q14 подключены по-разному, чтобы их совместно подключенные эмиттеры были привязаны к земле через реферирующий резистор R14. База Q13 подключена к незаземленной клемме конденсатора C.sub.B, а база Q14 подключена к узлу между резисторами деления напряжения R15 и R16, соединенными последовательно между B + и землей.
Компараторы 60 и 70 работают так, что NPN-транзисторы Q10 и Q14, а через них PNP-транзисторы Q12 и Q15, включаются для создания выходов A и B соответственно на коллекторах Q12 и Q15 только до тех пор, пока напряжения VCA и V CB, подключенные от конденсатора C A и C B соответственно к базам Q11 и Q12, НИЖЕ опорных напряжений, связанных с базами Q10 и Q14 соответственно.
Поскольку в проиллюстрированном варианте осуществления изобретения выход A или B создается только в том случае, если данный интервал FF1 или FF1 * больше, чем непосредственно предшествующий непрерывный интервал FF1 * или FF1, схема настоящего варианта осуществления определяет, следует ли не настоящий интервал больше, чем предыдущий, только в конце текущего интервала. Другими словами, единственный раз, когда сток 50 тока разряжает конденсатор C A или C B НИЖЕ его соответствующего опорного напряжения, происходит ближе к концу соответствующего интервала FF1 или FF1 *.Этот факт используется логикой 80 исключающего ИЛИ при определении, есть ли выход A или B в соответствующих смежных интервалах FF1 и FF1 *, при этом схема исключает появление выходов A и B в одном и том же FF1 или FF1 *. интервал.
Эксклюзив OR Logic Ciruit 80 Логическая схема 80 исключающего ИЛИ содержит второй и третий триггеры FF2 и FF3, подключенные к различным логическим элементам, включая три логических элемента И с двумя входами и переключатель отключения вывода. Три логических элемента И с двумя входами состоят из диодов D5 и D6, диодов D7 и D8 и диодов D13 и D14.Переключатель блокировки выхода содержит NPN-транзистор Q32.
Три логических элемента И с двумя входами состоят из диодов D5 и D6, диодов D7 и D8 и диодов D13 и D14.Переключатель блокировки выхода содержит NPN-транзистор Q32.
Аноды диодов D5 и D6 обычно подключены к заданному входу триггера 3, а также к узлам между резисторами деления напряжения R30 и R31, включенными последовательно между B + и землей. Аналогичным образом аноды диодов D7 и D8 подключены к заданному входу триггера 2, а также к узлу между резисторами деления напряжения R32 и R33, включенными последовательно между B + и землей. Катоды диодов D5 и D8 соответственно подключены к выходам FF1 и FF1 * триггера 20, а катоды диодов D7 и D6 соответственно подключены к коллекторам Q12 и Q15 компараторов 60 и 70.
Триггер 2 настроен на создание ВЫСОКОГО выхода за счет совпадения выхода FF1 * из триггера 20 и выхода A из компаратора 60 и сбрасывается при переходе триггера 20 из FF1 в FF1 *, конденсатора C7 на вход сброса триггера 2, дифференцирующий переход от FF1 к FF1 *, чтобы произвести положительный всплеск, сбрасывающий триггер. Точно так же триггер 3 устанавливается путем совпадения выхода FF1 из триггера 20 и выхода B из компаратора 70 и сбрасывается путем перехода выхода триггера 20 из FF1 * в FF1, конденсатор C6 на входе сброса триггер 3, дифференцирующий переход, для создания положительного выброса на входной клемме сброса.
Точно так же триггер 3 устанавливается путем совпадения выхода FF1 из триггера 20 и выхода B из компаратора 70 и сбрасывается путем перехода выхода триггера 20 из FF1 * в FF1, конденсатор C6 на входе сброса триггер 3, дифференцирующий переход, для создания положительного выброса на входной клемме сброса.
Выходы триггеров FF2 и FF3 соединены с катодами затворных диодов И D13 и D14, аноды которых обычно соединены резистором связи R42 с базой NPN-транзистора Q32 переключателя отключения вывода. База Q32 соответствующим образом смещена относительно B + с помощью резистора смещения R41, так что, когда один или другой из выходов компаратора A или B не присутствуют в смежных интервалах FF1 и FF1 *, смещение, в противном случае предоставленное базе Q32, устраняется. через источник НИЗКОГО напряжения, обеспечивающий НИЗКИЙ выход на соответствующем выходе триггера 2 или 3.
Однако, когда двигатель подвергается более длительному, чем межцикловое замедление, компараторы 60 и 70 выдают свои выходные сигналы A и B в непрерывных интервалах FF1 и FF1 *. Как было только что объяснено выше относительно компараторов 60 и 70, их выходы A и B формируются ближе к концу соответствующих интервалов FF1 или FF1 * или к концу участка с понижением напряжения, генерируемого на конденсаторе C. sub.A или C.sub. Поскольку конденсаторы C6 и C7 на входах триггеров 3 и 2 вызывают сброс этих триггеров на переднем фронте перехода FF1 в FF1 * или наоборот, одновременное появление выхода A на коллекторе Q12 с FF1 * устанавливает триггер 2 ближе к концу интервала FF1 * и позволяет FF2 оставаться установленным в течение последующего интервала FF1 до перехода к FF1 *.Точно так же одновременное совпадение выхода B на коллекторе Q15 с выходом FF1 триггера 20 устанавливает триггер 3 ближе к концу интервала FF1 и позволяет FF3 оставаться установленным в течение последующего интервала FF1 * до перехода к FF1.
Как было только что объяснено выше относительно компараторов 60 и 70, их выходы A и B формируются ближе к концу соответствующих интервалов FF1 или FF1 * или к концу участка с понижением напряжения, генерируемого на конденсаторе C. sub.A или C.sub. Поскольку конденсаторы C6 и C7 на входах триггеров 3 и 2 вызывают сброс этих триггеров на переднем фронте перехода FF1 в FF1 * или наоборот, одновременное появление выхода A на коллекторе Q12 с FF1 * устанавливает триггер 2 ближе к концу интервала FF1 * и позволяет FF2 оставаться установленным в течение последующего интервала FF1 до перехода к FF1 *.Точно так же одновременное совпадение выхода B на коллекторе Q15 с выходом FF1 триггера 20 устанавливает триггер 3 ближе к концу интервала FF1 и позволяет FF3 оставаться установленным в течение последующего интервала FF1 * до перехода к FF1.
Как можно лучше понять со ссылкой на фиг. 2 формы сигнала, за исключением VCB, который не представляет собой более долгосрочное замедление, но включает в себя точечные выходные сигналы B и FF3, которые соответствуют, генерация выходных сигналов A и B в любых двух смежных интервалах FF1 и FF1 * вызывает триггеры 2 и 3, чтобы оба производили ВЫСОКИЕ выходы, которые перекрывают друг друга на протяжении выходов A и B компараторов 60 и 70. В течение интервалов, в которые выходы ВЫСОКОГО уровня триггеров 2 и 3 перекрываются, катоды затворных диодов И D13 и D14 имеют обратное смещение, чтобы транзистор Q32 мог быть включен через резисторы 42 и 43. При включении Q32 блокируется транзистор грубой шероховатости Q26. путем заземления через переход коллектор-эмиттер Q32 выходные импульсы A и B, которые в противном случае смещали бы Q26 в положение ON.
В течение интервалов, в которые выходы ВЫСОКОГО уровня триггеров 2 и 3 перекрываются, катоды затворных диодов И D13 и D14 имеют обратное смещение, чтобы транзистор Q32 мог быть включен через резисторы 42 и 43. При включении Q32 блокируется транзистор грубой шероховатости Q26. путем заземления через переход коллектор-эмиттер Q32 выходные импульсы A и B, которые в противном случае смещали бы Q26 в положение ON.
Таким образом, логическая схема 80 «исключающее ИЛИ» обеспечивает смещение базы при включении в виде выходного сигнала A или B от компараторов 60 или 70, только когда присутствует один, но не оба или ни один из этих выходов.
Цепь нормализации скорости 90 Как было объяснено выше со ссылкой на формы сигналов на фиг. 2, восходящие или подсчитываемые части заряда, поступающие на конденсаторы C A и C B в течение интервалов FF1 и FF1 *, изменяются обратно пропорционально частоте вращения двигателя в интересующем диапазоне частоты вращения двигателя, 600 об / мин. – 3000 об / мин. Кроме того, компараторы 60 и 70 генерируют соответствующие выходные импульсы A и B ближе к концу соответствующих интервалов FF1 * и FF1. Таким образом, обе самые верхние области нарастающей части формы волны напряжения V.sub.CB на конденсаторе CB, а также выход A возникают ближе к концу интервала FF1 *. Точно так же верхняя область участка линейного нарастания формы волны напряжения V CA на конденсаторе C A, а также выход B возникают ближе к концу интервала FF1. Схема 90 нормализации скорости использует тот факт, что выходной сигнал A или B соответствует верхним областям участка линейного нарастания сигнала VCB или VCA, чтобы изменять с частотой вращения двигателя заряд, вводимый в скорость. конденсатор нормализующий C.sub.N во время данного вывода A или B. Для этого схема 90 нормализации скорости содержит пару NPN-транзисторов Q23 и Q24 для передачи данных по скорости, PNP-транзистор Q25 источника переменного тока, NPN-транзистор Q26 необработанной шероховатости и конденсатор CN нормализации скорости.
– 3000 об / мин. Кроме того, компараторы 60 и 70 генерируют соответствующие выходные импульсы A и B ближе к концу соответствующих интервалов FF1 * и FF1. Таким образом, обе самые верхние области нарастающей части формы волны напряжения V.sub.CB на конденсаторе CB, а также выход A возникают ближе к концу интервала FF1 *. Точно так же верхняя область участка линейного нарастания формы волны напряжения V CA на конденсаторе C A, а также выход B возникают ближе к концу интервала FF1. Схема 90 нормализации скорости использует тот факт, что выходной сигнал A или B соответствует верхним областям участка линейного нарастания сигнала VCB или VCA, чтобы изменять с частотой вращения двигателя заряд, вводимый в скорость. конденсатор нормализующий C.sub.N во время данного вывода A или B. Для этого схема 90 нормализации скорости содержит пару NPN-транзисторов Q23 и Q24 для передачи данных по скорости, PNP-транзистор Q25 источника переменного тока, NPN-транзистор Q26 необработанной шероховатости и конденсатор CN нормализации скорости.
Транзистор необработанной шероховатости Q26 насыщается на время выходного импульса A или B, генерируемого на коллекторах Q12 или Q15 компараторов 60 и 70 и передающегося на базу Q26 через резистор R35 и диод D11.Резистор R28 соединен последовательно с переходом эмиттер-коллектор Q25 и переходом коллектор-эмиттер Q26 между B + и незаземленной клеммой конденсатора нормализации скорости CN. База Q25 соединена совместно с эмиттерами Q23 и Q24 и смещается величиной токов, пропускаемых транзисторами Q23 и Q24 через резистор смещения R27, подключенный между базой Q25 и землей. Напряжения VCA и VCB прикладываются к базам Q23 и Q24 соответственно, а резисторы R25 и R26, соответственно соединяющие коллекторы Q23 и Q24 с B +, выбираются так, чтобы транзисторы Q23 и Q24 могли работать в своих линейные области по величине V.Напряжения subCA и VCB, соответственно, подключенные к базам Q23 и Q24. При таком смещении транзисторов Q23 и Q24 проводимость через один увеличивается линейно, в то время как проводимость через другой линейно уменьшается до тех пор, пока последний не будет выключен во время соответствующего выхода A или B, когда соответствующая часть кривой спада конденсатора НИЖЕ опорного напряжения компаратора. Например, транзистор Q23 выключен во время выхода A, потому что тогда часть линейного спада напряжения V.sub.CA сигнал, связанный с базой Q23, по определению НИЖЕ опорного напряжения, подаваемого на компаратор 60. И наоборот, транзистор Q24 включен, и проводимость через него увеличивается в течение того же интервала выхода A. Увеличение проводимости Q24 увеличивает смещение при выключении на базе Q25, уменьшая проводимость Q25 и, в свою очередь, уменьшая заряд, поступающий на конденсатор нормализации скорости C N. Другими словами, поскольку проводимость Q24 увеличивается с уменьшением скорости двигателя, проводимость Q25 уменьшается с уменьшением скорости двигателя, так что заряд, поступающий на конденсатор нормализации скорости C.sub.N в течение заданного интервала выходной мощности A также уменьшается с уменьшением частоты вращения двигателя.
Например, транзистор Q23 выключен во время выхода A, потому что тогда часть линейного спада напряжения V.sub.CA сигнал, связанный с базой Q23, по определению НИЖЕ опорного напряжения, подаваемого на компаратор 60. И наоборот, транзистор Q24 включен, и проводимость через него увеличивается в течение того же интервала выхода A. Увеличение проводимости Q24 увеличивает смещение при выключении на базе Q25, уменьшая проводимость Q25 и, в свою очередь, уменьшая заряд, поступающий на конденсатор нормализации скорости C N. Другими словами, поскольку проводимость Q24 увеличивается с уменьшением скорости двигателя, проводимость Q25 уменьшается с уменьшением скорости двигателя, так что заряд, поступающий на конденсатор нормализации скорости C.sub.N в течение заданного интервала выходной мощности A также уменьшается с уменьшением частоты вращения двигателя.
Цепь сброса 100
Схема 100 сброса выполняет сброс конденсаторов CA и CB один раз в каждый соответствующий интервал FF1 или FF1 *, а также выполняет сброс конденсатора CN нормализации скорости в сочетании с каждым переходом флипа. flop 20. Конденсатор C N нормализации скорости, таким образом, сбрасывается в два раза быстрее, чем сбрасываются конденсаторы C A и C B.
flop 20. Конденсатор C N нормализации скорости, таким образом, сбрасывается в два раза быстрее, чем сбрасываются конденсаторы C A и C B.
Конденсатор C.sub.A сбрасывается через селективно включенный дифференциальный регулятор в виде транзистора источника тока PNP Q16, пары дифференциально подключенных транзисторов PNP Q17 и Q18 и разрядного транзистора NPN Q19. Транзистор Q16 источника тока обычно смещен в положение ВЫКЛ. Напряжением, подаваемым на базу Q16 от узла между резисторами деления напряжения R17 и R18, которые сами соединены последовательно между B + и землей. База Q16 также соединена диодом D1 и конденсатором C3 с выходом FF1 * триггера 20.Следовательно, при переходе триггера 20 из FF1 * в FF1 конденсатор C3 вызывает подачу отрицательного импульса на базу Q16, мгновенно переводя Q16 в состояние ВКЛ и выборочно активируя дифференциальную пару Q17 и Q18. Коллектор Q17 соединен с базой Q19, а база Q17 соединена с узлом между резисторами деления напряжения R19 и R20, которые сами соединены последовательно между B + и землей. База Q18 соединена как с незаземленным выводом конденсатора C A, так и с коллектором транзистора Q19, база которого заземлена.Когда переход FF1 * в FF1 на мгновение приводит к включению Q16 и, в свою очередь, пары Q17-Q18, конденсатор C A разряжается через переход коллектор-эмиттер Q19 до тех пор, пока напряжение V CA не снизится до значения сброса. уровень, существующий в узле между резисторами деления напряжения R19 и R20.
База Q18 соединена как с незаземленным выводом конденсатора C A, так и с коллектором транзистора Q19, база которого заземлена.Когда переход FF1 * в FF1 на мгновение приводит к включению Q16 и, в свою очередь, пары Q17-Q18, конденсатор C A разряжается через переход коллектор-эмиттер Q19 до тех пор, пока напряжение V CA не снизится до значения сброса. уровень, существующий в узле между резисторами деления напряжения R19 и R20.
Точно так же конденсатор C B сбрасывается схемой, содержащей транзистор Q21 источника тока, дифференциально подключенную пару PNP-транзисторов Q22 и Q22 ‘и NPN-разрядный транзистор Q20.Работая аналогично схеме, только что описанной для сброса конденсатора C A, переход триггера 20 с FF1 на FF1 * заставляет конденсатор C4 подавать отрицательный импульс на базу Q21, чтобы мгновенно включить Q21 и тем самым выборочно включить дифференциал пара Q22 и Q22 ‘. Конденсатор C B затем разряжается через переход коллектор-эмиттер Q20 до тех пор, пока напряжение на конденсаторе C B не снизится до напряжения сброса, связанного с базой Q23 из узла между резисторами деления напряжения R23 и R24, сами соединены последовательно между B + и землей.
Конденсатор C N нормализации скорости сбрасывается через переход коллектор-эмиттер NPN-разрядного транзистора Q27, эмиттер которого заземлен. База Q27 подключена к узлу между резисторами деления напряжения R28 и R29, соединенными последовательно диодами D2 и D3 между коллекторами Q16 и Q21 соответственно. Поскольку, как только что было описано, на коллекторах Q16 и Q21 генерируется импульс, совпадающий с переходом триггера 20 из одного из его состояний FF1 и FF1 * в другое, и поскольку, как было объяснено выше со ссылкой на В цепи 90 нормализации скорости, на конденсатор нормализации скорости C подается заряд.sub.N только ближе к концу каждого интервала FF1 или FF1 * сброс конденсатора нормализации скорости C N немного задерживается после окончания интервала FF1 или FF1 *, чтобы позволить схеме 110 переноса заряда передавать все заряд накапливается на конденсаторе C N до шероховатости выходного конденсатора C R для последующей обработки и использования устройством 120 использования. Небольшая задержка сброса конденсатора C N нормализации скорости после перехода триггера 20 осуществляется конденсатором C5, подключенным между базой Q27 и землей.
Небольшая задержка сброса конденсатора C N нормализации скорости после перехода триггера 20 осуществляется конденсатором C5, подключенным между базой Q27 и землей.
Цепь передачи заряда 110
Для удаления и сохранения заряда, возникающего на конденсаторе нормализации скорости CN во время каждого интервала FF1 или FF1 *, схема 110 передачи заряда содержит схему включения, содержащую NPN-транзисторы Q33 и Q34, пару транзисторов PNP-источника тока Q31 и Q35. , пара дифференциально подключенных PNP-транзисторов Q28 и Q29 и разрядный NPN-транзистор Q30. Эмиттеры дифференциальной пары Q28 и Q29 обычно подключены к коллектору источника тока PNP Q35, эмиттер которого подключен к B + через резистор смещения R36.База Q28 подключена к незаземленной клемме нормирующего конденсатора C N, а база Q29 подключена как к незаземленной клемме выходного конденсатора C R для измерения шероховатости, так и к коллектору разрядного транзистора Q30. , эмиттер которого заземлен, а коллектор соединен с коллектором Q28. Коллектор Q30 также соединен с коллектором транзистора Q31 источника тока, эмиттер которого соединен с B + через резистор смещения R44.
Коллектор Q30 также соединен с коллектором транзистора Q31 источника тока, эмиттер которого соединен с B + через резистор смещения R44.
Для нормального отключения схемы 110 переноса заряда транзисторы Q35 и Q31 источника тока обычно смещаются напряжением, подаваемым на базы Q35 и Q31 соответственно через диоды D15 и D16, катоды которых подключены к узлам между парой резисторы деления напряжения R40 и R46 сами включены последовательно между B + и землей.Катоды диодов D15 и D16 также соединены с коллектором передаточной схемы, включающей транзистор Q34, эмиттер которого заземлен, а коллектор смещен на B + через резистор R40. База Q34 соединена резистором связи R45 с коллектором нормально включенного транзистора Q33, эмиттер которого заземлен, коллектор которого также соединен с B + через резистор связи R39, а база которого соединена с узел между парой резисторов деления напряжения R37 и R38, которые сами соединены последовательно между B + и землей.Также с базой Q33 соединен один вывод конденсатора C6, другой вывод которого соединен с базой Q26, а также с выходами A и B компараторов 60 и 70 через резистор R35 и диод D11.
При падении выходного импульса A или B от компараторов 60 или 70 конденсатор C6 создает отрицательный импульс на базе Q33, на мгновение выключающий Q33 и включающий Q34. Таким образом, транзисторы Q35 и Q31 источника тока мгновенно включаются, поскольку их соответствующие базы соединяются с землей через соответствующие диоды D15 и D16 и переход коллектор-эмиттер Q34.Когда Q31 включен, через него происходит зарядка выходного конденсатора C R шероховатости до тех пор, пока напряжение на нем не повысится до значения, которое ранее было введено на конденсаторе C N нормализации скорости во время предыдущего непрерывного интервала FF1 или FF1 *. Когда заряд, введенный на конденсатор C R, немного превышает заряд, существующий на конденсаторе C N, транзистор Q28 включает разрядный транзистор Q30 для разряда конденсатора C R через переход коллектор-эмиттер Q30. до появления напряжения на конденсаторе С.sub.R равно таковому на конденсаторе C.sub.
Хотя вышеописанный предпочтительный вариант осуществления выборочно включает схему 110 переноса заряда только на мгновение в соответствии с параметрами дифференцирующего конденсатора C6, для специалиста в данной области техники будет очевидно, что выход A или B компараторов 60 и 70 может быть соединен непосредственно на базу разрешающего транзистора Q34, чтобы, таким образом, активировать схему 110 переноса заряда в течение всей длительности выходного импульса A или B.
Раскрыты средства датчика шероховатости для обнаружения и измерения межцикловых изменений скорости двигателя внутреннего сгорания.Датчик содержит средства 10 и 20 датчика частоты вращения двигателя, которые могут быть подключены для реагирования на событие двигателя, повторяющееся в каждом цикле двигателя, для выработки в нем сигнала, содержащего первое и второе чередующиеся смежные состояния FF1 и FF1 *, разделенные первым и вторым переходами между ними, определяющими первый и второй интервалы. каждый из этих интервалов зависит от мгновенных оборотов двигателя.
Также предусмотрены первое и второе средства хранения контента C A и C B, приспособленные для хранения содержания, возрастающего от начального значения до пикового значения и затем уменьшающегося от пикового значения до более низкого значения.
Средства 40 и 50 увеличения и уменьшения содержания функционально соединены со средствами 10 и 20 датчика частоты вращения двигателя, а также с первым и вторым средствами хранения содержания C A и C B. Средства 40 и 50 увеличения и уменьшения содержания работают на протяжении всей длины одного из первого и второго интервалов, чтобы увеличивать содержание одного из первого и второго средств хранения от начального значения, установленного в нем при первом переходе к пиковому значению. устанавливается при втором переходе, и для одновременного уменьшения содержания другого из первого и второго средства хранения от второго пикового значения, установленного в нем при первом переходе.Средства 40 и 50 увеличения и уменьшения содержания также работают во время смежных других из первого и второго интервалов, чтобы уменьшить содержание одного из первого и второго средств хранения от первого пикового значения до первого начального значения и для одновременного увеличения. содержимое другого из первого и второго средства хранения – от второго начального значения, установленного при втором переходе, до второго пикового значения, установленного при последующем первом переходе.
Средства 40 и 50 увеличения и уменьшения содержания работают на протяжении всей длины одного из первого и второго интервалов, чтобы увеличивать содержание одного из первого и второго средств хранения от начального значения, установленного в нем при первом переходе к пиковому значению. устанавливается при втором переходе, и для одновременного уменьшения содержания другого из первого и второго средства хранения от второго пикового значения, установленного в нем при первом переходе.Средства 40 и 50 увеличения и уменьшения содержания также работают во время смежных других из первого и второго интервалов, чтобы уменьшить содержание одного из первого и второго средств хранения от первого пикового значения до первого начального значения и для одновременного увеличения. содержимое другого из первого и второго средства хранения – от второго начального значения, установленного при втором переходе, до второго пикового значения, установленного при последующем первом переходе.
Датчик шероховатости дополнительно содержит первое и второе средства 60 и 70 компаратора, подключенные соответственно к первому и второму средствам хранения C. sub.A и C.sub.B и функционирует для создания первого и второго выходных сигналов A и B, каждый из которых имеет ширину, равную разнице между временем, когда содержимое соответствующего средства хранения уменьшилось до его соответствующего начального значения, возникающего в интервал, в течение которого содержимое средства хранения уменьшается, и конец этого интервала.
sub.A и C.sub.B и функционирует для создания первого и второго выходных сигналов A и B, каждый из которых имеет ширину, равную разнице между временем, когда содержимое соответствующего средства хранения уменьшилось до его соответствующего начального значения, возникающего в интервал, в течение которого содержимое средства хранения уменьшается, и конец этого интервала.
Средство 80 исключающего ИЛИ подключено к средствам 60 и 70 компаратора, пропуская один из первого и второго выходных сигналов A или B, только если присутствует один выходной сигнал, а не оба или ни один из них.
Средство 90 нормализации скорости подключено к средству 80 исключающего ИЛИ и первому и второму средствам хранения C A и C B и служит для изменения выходов A или B компараторов 60 или 70, подключенных к одно из первого и второго средств хранения в соответствии с содержимым другого из первого и второго средств хранения.
После описания одного варианта осуществления моего изобретения понятно, что конкретные термины и примеры используются только в описательном смысле, а не в целях ограничения. Другие варианты осуществления изобретения, их модификации и эквивалентные альтернативы будут очевидны специалистам в данной области техники и могут быть выполнены без отклонения от истинного духа и объема моего изобретения. Например, в качестве эквивалентной альтернативы вышеописанному аналоговому варианту осуществления изобретения предполагается его цифровой эквивалент, использующий пару многоступенчатых счетчиков вверх-вниз, альтернативно и дополнительно подсчитываемых вверх и вниз для смежных интервалов, ширина которых изменяется в зависимости от двигателя. скорость.Разности тактовых импульсов в последовательных интервалах могут затем обрабатываться подходящей логикой для передачи только тех разностей, которые представляют желаемую информацию о шероховатости, которую затем можно сравнивать и изменять с помощью фактической скорости, чтобы обеспечить сигнал, подходящий для целей управления.
Другие варианты осуществления изобретения, их модификации и эквивалентные альтернативы будут очевидны специалистам в данной области техники и могут быть выполнены без отклонения от истинного духа и объема моего изобретения. Например, в качестве эквивалентной альтернативы вышеописанному аналоговому варианту осуществления изобретения предполагается его цифровой эквивалент, использующий пару многоступенчатых счетчиков вверх-вниз, альтернативно и дополнительно подсчитываемых вверх и вниз для смежных интервалов, ширина которых изменяется в зависимости от двигателя. скорость.Разности тактовых импульсов в последовательных интервалах могут затем обрабатываться подходящей логикой для передачи только тех разностей, которые представляют желаемую информацию о шероховатости, которую затем можно сравнивать и изменять с помощью фактической скорости, чтобы обеспечить сигнал, подходящий для целей управления.
Таким образом, я стремлюсь в прилагаемой формуле изобретения охватить такие модификации, изменения и эквиваленты, которые находятся в пределах истинного объема и сущности моего изобретения.
Устройство контроля скорости автомобиля | Область техники, к которой относится изобретение TREA
:Настоящее изобретение относится к блоку управления скоростью транспортного средства для транспортного средства, которое движется с помощью нескольких приводных двигателей.
УРОВЕНЬ ТЕХНИКИ
Существовала технология управления, такая как система поддержки движения, такая как круиз-контроль (CC) и адаптивный круиз-контроль (ACC), для транспортного средства, чтобы автоматически следовать целевой скорости, установленной системой или работой водитель. Такая технология управления скоростью транспортного средства также используется в автоматической системе вождения. Традиционное транспортное средство, оснащенное несколькими приводными двигателями, сконфигурировано так, что при управлении скоростью транспортного средства часть вычисления распределения крутящего момента вычисляет сумму командных крутящих моментов, которые должны быть переданы транспортному средству в целом, а затем распределяет крутящие моменты между соответствующими двигателями и двигателем например, Патентный документ 1).
Кроме того, предлагается способ управления каждым двигателем внутриколесного транспортного средства, когда разница скоростей между внутренними и внешними колесами создается операцией рулевого управления на основе операции акселератора водителя, такой как нажатие кнопки педаль акселератора посредством комбинации управления с прямой связью и управления с обратной связью (см. Патентный документ 2).
ДОКУМЕНТЫ ИЗУЩЕСТВА
Патентные документы
- 1: JP2008-062894 A и
- 2: JP2011-139561 A.
Патентный документ
Патентный документ
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Проблема, которую должно решить изобретение
Поскольку блок управления скоростью транспортного средства, раскрытый в Патентном документе 1, совместно вычисляет общие командные крутящие моменты, которые должны быть переданы транспортному средству в целом, скорость последующих действий зависит от о настройке блока управления, ответственного за коллективный расчет. Однако транспортное средство, движущееся с помощью нескольких приводных двигателей, имеет разные трансмиссии, соответственно состоящие из механических компонентов от двигателей до колес, таких как шестерни и валы.Параметры для традиционного блока управления должны быть разработаны с учетом трансмиссии, характеристики которой трудно увеличить. Блок управления скоростью транспортного средства, раскрытый в Патентном документе 2, также не принимает во внимание различие в соответствующих трансмиссиях от двигателей до колес.
Однако транспортное средство, движущееся с помощью нескольких приводных двигателей, имеет разные трансмиссии, соответственно состоящие из механических компонентов от двигателей до колес, таких как шестерни и валы.Параметры для традиционного блока управления должны быть разработаны с учетом трансмиссии, характеристики которой трудно увеличить. Блок управления скоростью транспортного средства, раскрытый в Патентном документе 2, также не принимает во внимание различие в соответствующих трансмиссиях от двигателей до колес.
Здесь дается дополнительное объяснение трудности повышения эффективности последующего наблюдения. Под следящей характеристикой понимается скорость схождения увеличения скорости транспортного средства к целевой скорости и быстрота восстановления до целевой скорости, когда скорость транспортного средства колеблется из-за возмущения.Поскольку трансмиссия транспортного средства не является полностью жесткой, вибрация из-за ее резонансной характеристики возбуждается входным крутящим моментом, имеющим конкретную полосу частот. Управление с обратной связью (FB) обычно используется в блоке управления скоростью транспортного средства, и увеличение его усиления FB увеличивает эффективность отслеживания. Однако, поскольку увеличение усиления сдвигает полосу частот сигнала, циркулирующего в контуре управления FB, в область более высоких частот, если полоса частот включает резонансную частоту, возникает вибрация кузова транспортного средства.Это приводит к ухудшению качества езды и поломке трансмиссии. Таким образом, необходимо ограничить скорость слежения за блоком управления, принимая во внимание низкую резонансную частоту трансмиссии.
Управление с обратной связью (FB) обычно используется в блоке управления скоростью транспортного средства, и увеличение его усиления FB увеличивает эффективность отслеживания. Однако, поскольку увеличение усиления сдвигает полосу частот сигнала, циркулирующего в контуре управления FB, в область более высоких частот, если полоса частот включает резонансную частоту, возникает вибрация кузова транспортного средства.Это приводит к ухудшению качества езды и поломке трансмиссии. Таким образом, необходимо ограничить скорость слежения за блоком управления, принимая во внимание низкую резонансную частоту трансмиссии.
Настоящее изобретение направлено на преодоление проблемы, описанной выше, и направлено на обеспечение блока управления скоростью транспортного средства для управления скоростью транспортного средства, приводимого в движение несколькими двигателями, для улучшения характеристик отслеживания в направлении достижения целевой скорости.
Средства для решения проблемы
В соответствии с настоящим изобретением, блок управления скоростью транспортного средства, сконфигурированный для управления несколькими двигателями ведущих колес транспортного средства, снабженного несколькими двигателями, так что скорость транспортного средства соответствует скорости транспортного средства, указанной целью При вводе сигнала скорости транспортного средства блок управления скоростью транспортного средства включает в себя части управления с обратной связью, количество частей управления с обратной связью, соответствующее количеству нескольких двигателей, части управления с обратной связью, генерирующие управляющие моменты обратной связи для соответствующих двигателей на основе соответствующих отклонений между сигналами скорости от датчиков скорости, определяющих скорости вращения множества двигателей, и сигналом обратной связи целевой скорости транспортного средства, преобразованным из введенного сигнала целевой скорости транспортного средства фильтрами целевой скорости транспортного средства; часть управления с прямой связью, вычисляющая управляющий крутящий момент с прямой связью для транспортного средства в целом с использованием передаточной функции, входом которой является введенная целевая скорость транспортного средства, а выходом которой является командный крутящий момент с прямой связью для транспортного средства в целом, на основе введенного целевого транспортного средства -скоростной сигнал; и часть распределения крутящего момента, разделяющую управляющий крутящий момент с прямой связью на отдельные управляющие крутящие моменты с прямой связью для распределения между соответствующими двигателями, при этом передаточная функция является произведением передаточной функции целевого фильтра скорости транспортного средства, умноженной на обратную модель передаточной функции транспортное средство, вход которого является суммой сил в направлении перемещения транспортного средства, и крутящие моменты команд обратной связи и отдельные управляющие крутящие моменты с прямой связью соответственно суммируются для управления соответствующими двигателями.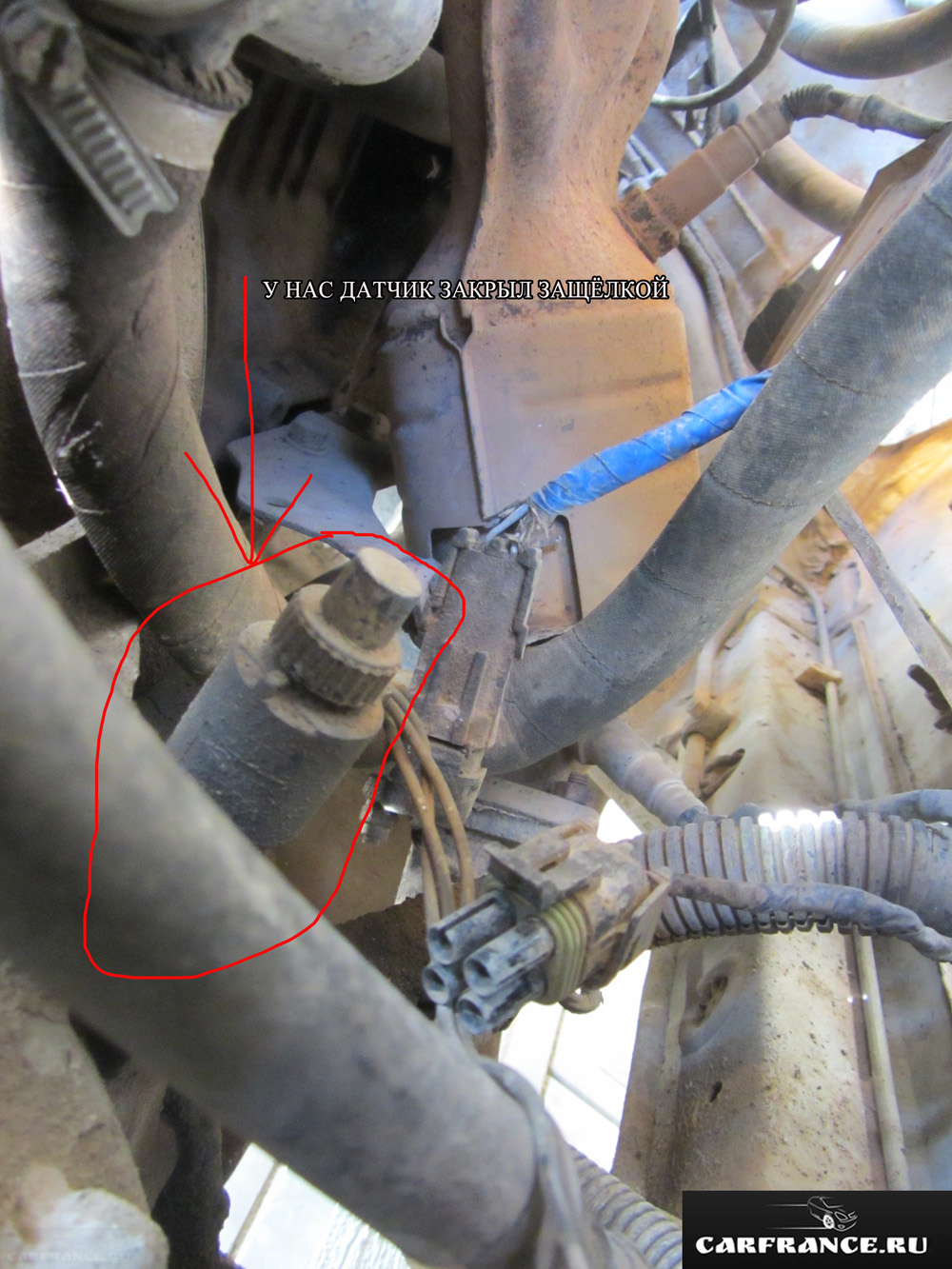
Преимущество изобретения
В соответствии с настоящим изобретением, для соответствующих двигателей предусмотрены контуры управления с обратной связью по скорости, что позволяет соответствующим образом регулировать части управления с обратной связью, чтобы максимально увеличить последующие характеристики в зависимости от резонанса. характеристики трансмиссии к двигателям. Кроме того, предусмотрена часть управления с прямой связью, общая для всех двигателей, и часть распределения крутящего момента разделяет управляющий крутящий момент с прямой связью на отдельные управляющие крутящие моменты с прямой связью для распределения между соответствующими двигателями в зависимости от ситуации, тем самым позволяя получить благоприятные последующие характеристики.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
РИС. 1 – блок-схема, показывающая конфигурацию блока управления скоростью транспортного средства согласно варианту 1 осуществления настоящего изобретения;
РИС. 2 – блок-схема, показывающая конфигурацию блока двигателя, в котором применяется блок управления скоростью транспортного средства согласно настоящему изобретению;
2 – блок-схема, показывающая конфигурацию блока двигателя, в котором применяется блок управления скоростью транспортного средства согласно настоящему изобретению;
РИС. 3 – концептуальная блок-схема, показывающая пример конфигурации транспортного средства, в котором применяется блок управления скоростью транспортного средства согласно настоящему изобретению;
РИС.4 – концептуальная блок-схема, показывающая другой пример конфигурации транспортного средства, в котором применяется блок управления скоростью транспортного средства согласно настоящему изобретению;
РИС. 5 – концептуальная блок-схема, показывающая еще один пример конфигурации транспортного средства, в котором применяется блок управления скоростью транспортного средства настоящего изобретения;
РИС. 6 – концептуальная блок-схема, показывающая еще один пример конфигурации транспортного средства, в котором применяется блок управления скоростью транспортного средства согласно настоящему изобретению;
РИС. 7 – блок-схема, показывающая примерную конфигурацию аппаратных средств системы, включающей в себя блок управления скоростью транспортного средства согласно настоящему изобретению;
7 – блок-схема, показывающая примерную конфигурацию аппаратных средств системы, включающей в себя блок управления скоростью транспортного средства согласно настоящему изобретению;
РИС. 8 – первый график Боде для объяснения конфигурации блока управления скоростью транспортного средства согласно варианту 2 осуществления настоящего изобретения;
РИС. 9 – схема, показывающая динамическую модель транспортного средства, для объяснения работы блока управления скоростью транспортного средства согласно варианту 2 осуществления настоящего изобретения;
РИС.10 – блок-схема, показывающая разомкнутый контур части управления FB, для объяснения конфигурации блока управления скоростью транспортного средства согласно варианту 2 осуществления настоящего изобретения;
РИС. 11 – второй график Боде для объяснения конфигурации блока управления скоростью транспортного средства согласно варианту 2 осуществления настоящего изобретения;
РИС.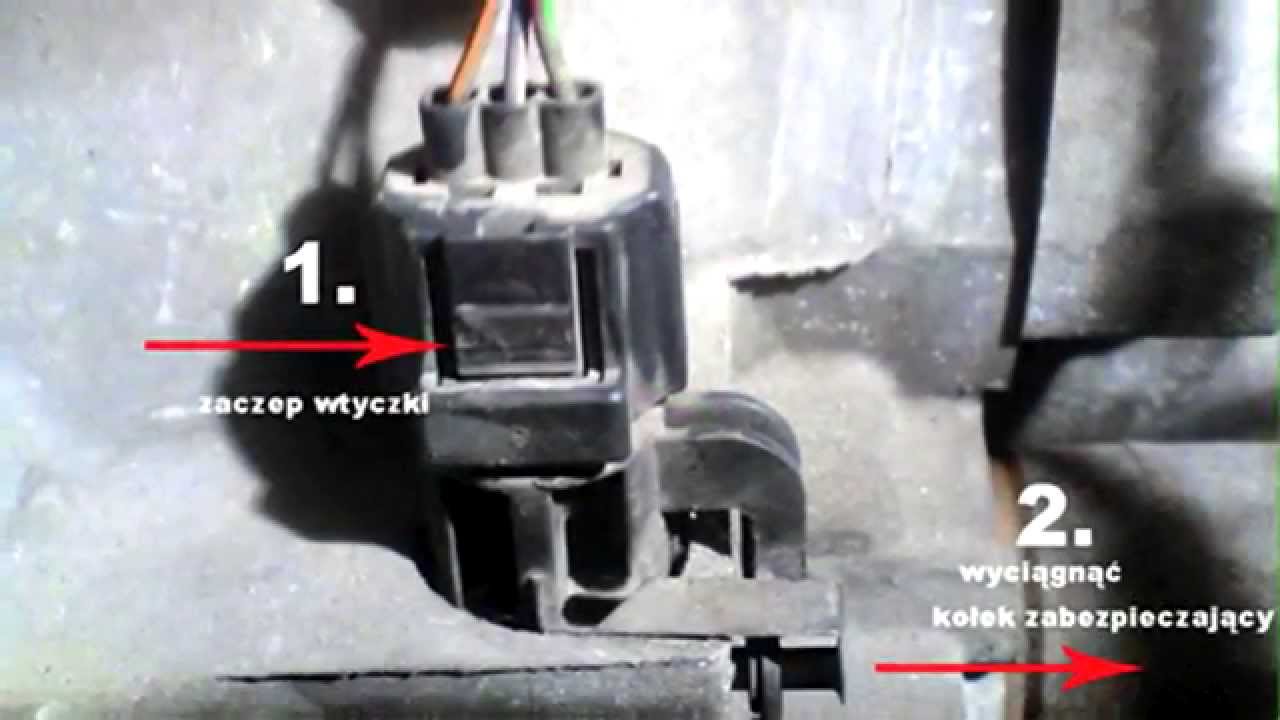 12 – третий график Боде для объяснения конфигурации блока управления скоростью транспортного средства согласно варианту 2 осуществления настоящего изобретения;
12 – третий график Боде для объяснения конфигурации блока управления скоростью транспортного средства согласно варианту 2 осуществления настоящего изобретения;
РИС.13 – вторая блок-схема, показывающая разомкнутый контур части управления FB, для объяснения конфигурации блока управления скоростью транспортного средства согласно варианту 2 осуществления настоящего изобретения;
РИС. 14 – блок-схема, показывающая конфигурацию блока управления скоростью транспортного средства согласно варианту 3 осуществления настоящего изобретения;
РИС. 15 – схема, поясняющая работу частей коррекции целевой скорости транспортного средства в блоке управления скоростью транспортного средства согласно Варианту 3 осуществления настоящего изобретения;
РИС.16 – увеличенная диаграмма, показывающая часть фиг. 9, для объяснения частей коррекции целевой скорости транспортного средства в блоке управления скоростью транспортного средства согласно Варианту 3 осуществления настоящего изобретения;
РИС. 17 – блок-схема, показывающая конфигурацию блока управления скоростью транспортного средства согласно варианту 4 осуществления настоящего изобретения;
17 – блок-схема, показывающая конфигурацию блока управления скоростью транспортного средства согласно варианту 4 осуществления настоящего изобретения;
РИС. 18 – схема, поясняющая работу блока управления скоростью транспортного средства согласно варианту 5 осуществления настоящего изобретения;
РИС.19 – блок-схема, показывающая работу блока управления скоростью транспортного средства согласно варианту 6 осуществления настоящего изобретения;
РИС. 20 – блок-схема, показывающая работу блока управления скоростью транспортного средства согласно варианту 7 осуществления настоящего изобретения;
РИС. 21 – схема, показывающая работу блока управления скоростью транспортного средства согласно варианту 7 осуществления настоящего изобретения; и
РИС. 22 – блок-схема, показывающая конфигурацию системы, включающей в себя блок управления скоростью транспортного средства, согласно варианту 7 осуществления настоящего изобретения.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Вариант 1 осуществления
Фиг. 3 показывает пример конфигурации транспортного средства 1 , снабженного блоком управления скоростью транспортного средства 100 согласно настоящему изобретению. Левое переднее колесо 21 , правое переднее колесо 22 , левое заднее колесо 23 и правое заднее колесо 24 , соответственно, приводятся в движение двигателями в четырех моторных блоках от 11 до 14 .Выходные крутящие моменты двигателей в моторных блоках , 11, – , 14, , соответственно, передаются на колеса 21, – 24 через трансмиссии, каждая из которых сконфигурирована с механическими компонентами, такими как редукторы и приводные валы. Двигатели в моторных блоках с 11 по 14 могут быть внутриколесными двигателями, интегрированными с колесами с 21, до 24 , соответственно. Транспортное средство, к которому применяется настоящее изобретение, может иметь три или два двигателя, то есть настоящее изобретение может применяться к транспортному средству, оборудованному несколькими двигателями. Пример конфигурации транспортного средства 1 , имеющего три двигателя, показан на фиг. 4, в котором моторные блоки 13 , 14 предназначены для привода правого и левого задних колес соответственно 23 , 24 и моторного блока 11 для привода передних колес 21 , 22 . Выходной крутящий момент моторного блока 11 передается на два передних колеса 21 , 22 через дифференциал 31 .Кроме того, количество передних и задних двигателей и конфигурация трансмиссии транспортного средства 1 могут быть реверсивными. Пример конфигурации транспортного средства 1 , имеющего два двигателя, показан на фиг. 5, в котором блок 11 двигателя переднего колеса предусмотрен для передних колес, а блок двигателя 13 заднего колеса – для задних колес. В этой конфигурации выходной крутящий момент моторных блоков 11 , 13 передается соответственно на правое и левое передние колеса 21 , 22 , а также на правое и левое задние колеса 23 , 24 через шестерни дифференциала 31 , 32 .
Пример конфигурации транспортного средства 1 , имеющего три двигателя, показан на фиг. 4, в котором моторные блоки 13 , 14 предназначены для привода правого и левого задних колес соответственно 23 , 24 и моторного блока 11 для привода передних колес 21 , 22 . Выходной крутящий момент моторного блока 11 передается на два передних колеса 21 , 22 через дифференциал 31 .Кроме того, количество передних и задних двигателей и конфигурация трансмиссии транспортного средства 1 могут быть реверсивными. Пример конфигурации транспортного средства 1 , имеющего два двигателя, показан на фиг. 5, в котором блок 11 двигателя переднего колеса предусмотрен для передних колес, а блок двигателя 13 заднего колеса – для задних колес. В этой конфигурации выходной крутящий момент моторных блоков 11 , 13 передается соответственно на правое и левое передние колеса 21 , 22 , а также на правое и левое задние колеса 23 , 24 через шестерни дифференциала 31 , 32 . Другой пример конфигурации транспортного средства 1 , имеющего два двигателя, показан на фиг. 6, на котором правое и левое передние колеса 21 , 22 соответственно приводятся в движение двигателями в моторных блоках 11 , 12 . В дальнейшем конфигурация блока управления скоростью транспортного средства , 100, описывается для транспортного средства, снабженного четырьмя двигателями с 11 по 14 . Следует отметить, что для транспортного средства, снабженного двигателями, отличными от четырех, количество секций управления в блоке , 100, управления скоростью транспортного средства может быть соответствующим образом увеличено или уменьшено в соответствии с количеством двигателей.
Другой пример конфигурации транспортного средства 1 , имеющего два двигателя, показан на фиг. 6, на котором правое и левое передние колеса 21 , 22 соответственно приводятся в движение двигателями в моторных блоках 11 , 12 . В дальнейшем конфигурация блока управления скоростью транспортного средства , 100, описывается для транспортного средства, снабженного четырьмя двигателями с 11 по 14 . Следует отметить, что для транспортного средства, снабженного двигателями, отличными от четырех, количество секций управления в блоке , 100, управления скоростью транспортного средства может быть соответствующим образом увеличено или уменьшено в соответствии с количеством двигателей.
РИС. 1 является блок-схемой, показывающей конфигурацию блока , 100, управления скоростью транспортного средства согласно Варианту 1 осуществления настоящего изобретения. Блок управления скоростью транспортного средства , 100, включает в себя часть управления с прогнозированием , 101, (далее «прямая связь» может также сокращаться как «FF»), фильтр целевой скорости транспортного средства , 120, , узел распределения крутящего момента , 102, и секции управления двигателем с 151 до 154 . Секции управления двигателем с , 151, по , 154, имеют части управления с обратной связью с 111 по 114 («обратная связь» может также сокращаться как «FB» в дальнейшем) и фильтры сигналов скорости с 121 по 124 , соответственно.Блок управления скоростью автомобиля 100 выдает командные моменты T 1 , T 2 , T 3 , T 4 на соответствующие двигатели 11 до 14 . Командные моменты T 1 , T 2 , T 3 , T 4 представляют собой соответствующие суммы командных моментов FB T fb1 , T fb2 , T fb3 , T fb4 от Части управления FB 111 до 114 и отдельные командные моменты FF T ff1 , T ff2 , T ff3 , T ff4 , которые вычисляются путем деления момента команды FF от части управления FF 101 деталью распределения крутящего момента 102 : T 1 = T fb1 + T ff1 , T 2 = T fb2 + T ff2 , T 3 = T + fb3 T ff3 и T 4 = T fb4 + T ff4 .
Секции управления двигателем с , 151, по , 154, имеют части управления с обратной связью с 111 по 114 («обратная связь» может также сокращаться как «FB» в дальнейшем) и фильтры сигналов скорости с 121 по 124 , соответственно.Блок управления скоростью автомобиля 100 выдает командные моменты T 1 , T 2 , T 3 , T 4 на соответствующие двигатели 11 до 14 . Командные моменты T 1 , T 2 , T 3 , T 4 представляют собой соответствующие суммы командных моментов FB T fb1 , T fb2 , T fb3 , T fb4 от Части управления FB 111 до 114 и отдельные командные моменты FF T ff1 , T ff2 , T ff3 , T ff4 , которые вычисляются путем деления момента команды FF от части управления FF 101 деталью распределения крутящего момента 102 : T 1 = T fb1 + T ff1 , T 2 = T fb2 + T ff2 , T 3 = T + fb3 T ff3 и T 4 = T fb4 + T ff4 .
Конфигурация каждого блока двигателя описана здесь со ссылкой на фиг. 2. Каждый из блоков двигателей с 11 по 14 имеет двигатель, инвертор для подачи напряжения на двигатель и датчик скорости для определения скорости вращения двигателя. Управляющие крутящие моменты T и (i = 1, 2, 3, 4) вводятся в инверторы и преобразуются в управляющие напряжения V и (i = 1, 2, 3, 4) для подачи на двигатели. Датчики скорости определяют скорости вращения соответствующих двигателей для вывода сигналов скорости вращения двигателя V mi (i = 1, 2, 3, 4) в соответствующие секции управления двигателем с 151 до 154 в транспортном средстве. блок управления скоростью 100 .
Сигнал целевой скорости транспортного средства V ref , который указывает целевую скорость транспортного средства, вводится из системы управления более высокого уровня или посредством действия водителя. Элементы управления FB от 111 до 114 вычисляют командные моменты FB T fb1 , T fb2 , T fb3 , T fb4 для ввода в соответствующие двигатели 11 до 14 , на основе различий между сигналом целевой скорости транспортного средства V refF обратной связи, полученным путем прохождения сигнала целевой скорости транспортного средства V ref через фильтр целевой скорости транспортного средства 120 и соответствующими сигналами скорости V mF1 , V mF2 , V mF3 , V mF4 , полученное пропусканием через фильтры сигналов скорости 121 до 124 сигналы скорости вращения двигателя V m1 , V m2 , V m3 , V m4 от датчиков скорости в моторных агрегатах. Расчет может быть выполнен с использованием пропорционально-интегрального (ПИ) управления. В то время как целевой сигнал скорости транспортного средства V ref может, возможно, изменяться ступенчатым образом в зависимости от настроек, измененных, например, в результате операции переключения водителя, фильтр целевой скорости транспортного средства , 120, изменяет форму сигнала, чтобы обеспечить плавное изменение скорости автомобиля. Фильтры сигналов скорости с 121 по 124 имеют эффект удаления шума в соответствующих сигналах скорости вращения двигателя.Если шум сам по себе низкий, фильтры сигнала скорости можно не использовать.
Расчет может быть выполнен с использованием пропорционально-интегрального (ПИ) управления. В то время как целевой сигнал скорости транспортного средства V ref может, возможно, изменяться ступенчатым образом в зависимости от настроек, измененных, например, в результате операции переключения водителя, фильтр целевой скорости транспортного средства , 120, изменяет форму сигнала, чтобы обеспечить плавное изменение скорости автомобиля. Фильтры сигналов скорости с 121 по 124 имеют эффект удаления шума в соответствующих сигналах скорости вращения двигателя.Если шум сам по себе низкий, фильтры сигнала скорости можно не использовать.
Блок управления FF 101 вычисляет командный крутящий момент FF T ff на основе сигнала целевой скорости транспортного средства V ref . При вычислении может использоваться произведение передаточной функции целевого фильтра , 120, скорости транспортного средства, умноженное на обратную модель передаточной функции транспортного средства 1 . Передаточная функция транспортного средства 1 для использования в расчетах может быть получена, если предположить, что транспортное средство 1 является материальной точкой, и принимая в качестве входных данных сумму сил в направлении поступательного движения транспортного средства и как вывод скорости материальной точки.Силы в направлении поступательного движения могут быть получены путем преобразования управляющих крутящих моментов для моторных блоков 111 в 114 , принимая во внимание передаточные числа редуктора в соответствующих трансмиссиях, радиус колеса и т.п. Кроме того, передаточная функция может быть получена с учетом влияния качения и сопротивления воздуха на материальную точку. В идеальных условиях без каких-либо помех или ошибок моделирования транспортное средство 1 может следовать отфильтрованному сигналу целевой скорости транспортного средства обратной связи V refF путем ввода командного момента FF.
Передаточная функция транспортного средства 1 для использования в расчетах может быть получена, если предположить, что транспортное средство 1 является материальной точкой, и принимая в качестве входных данных сумму сил в направлении поступательного движения транспортного средства и как вывод скорости материальной точки.Силы в направлении поступательного движения могут быть получены путем преобразования управляющих крутящих моментов для моторных блоков 111 в 114 , принимая во внимание передаточные числа редуктора в соответствующих трансмиссиях, радиус колеса и т.п. Кроме того, передаточная функция может быть получена с учетом влияния качения и сопротивления воздуха на материальную точку. В идеальных условиях без каких-либо помех или ошибок моделирования транспортное средство 1 может следовать отфильтрованному сигналу целевой скорости транспортного средства обратной связи V refF путем ввода командного момента FF.
Деталь распределения крутящего момента 102 получает командный крутящий момент FF T ff и затем выводит отдельные командные моменты FF T ff1 , T ff2 , T ff3 , T ff4 для соответствующих двигателей. В это время соответствующие индивидуальные командные моменты FF рассчитываются таким образом, чтобы удовлетворить T ff1 + T ff2 + T ff3 , + T ff4 . = T ff . Соответствие знаков T ff1 , T ff2 , T ff3 , T ff4 знакам T ff позволяет сузить диапазон расчета деления крутящего момента.
В это время соответствующие индивидуальные командные моменты FF рассчитываются таким образом, чтобы удовлетворить T ff1 + T ff2 + T ff3 , + T ff4 . = T ff . Соответствие знаков T ff1 , T ff2 , T ff3 , T ff4 знакам T ff позволяет сузить диапазон расчета деления крутящего момента.
При такой конфигурации блок управления скоростью транспортного средства 100 , принимая командные моменты FF в качестве основы для отслеживания целевой скорости транспортного средства, корректирует отклонения от целевых скоростей соответствующих колес из-за возмущения. и ошибка моделирования элементами управления FB с 111 до 114 . Поскольку управляющие части FB с 111 по 114 могут быть спроектированы так, чтобы увеличивать последующие характеристики, принимая во внимание характеристики соответствующих трансмиссий для колес, например. g. резонансные характеристики трансмиссии, блок управления скоростью транспортного средства , 100, настоящего изобретения может реализовать управление скоростью транспортного средства, которое позволяет получить благоприятные последующие характеристики, подходящие для транспортного средства 1 , приводимого в движение несколькими двигателями.
g. резонансные характеристики трансмиссии, блок управления скоростью транспортного средства , 100, настоящего изобретения может реализовать управление скоростью транспортного средства, которое позволяет получить благоприятные последующие характеристики, подходящие для транспортного средства 1 , приводимого в движение несколькими двигателями.
В регуляторах скорости, чтобы улучшить последующие характеристики, часто используется конфигурация управления с двумя степенями свободы, в которую добавляется управление FF. Системы управления FF обычно проектируются без учета помех.Однако в случае транспортного средства, приводимого в движение несколькими двигателями, использование двух средств управления степенью свободы индивидуально для каждого двигателя приводит к тому, что управляющие крутящие моменты FF действуют как помехи друг другу, в результате чего невозможно получить желаемую последующую характеристику. В отличие от этого, настоящее изобретение обеспечивает часть управления FF, которая является общей для всех двигателей. Поскольку общая часть управления FF предусмотрена для всех двигателей, благоприятная последующая характеристика может быть получена путем распределения, в зависимости от ситуаций, на соответствующие двигатели отдельных управляющих крутящих моментов FF, разделенных на часть распределения крутящего момента.Кроме того, использование степени свободы узла распределения крутящего момента позволяет управлять скоростью транспортного средства с учетом кинематических характеристик транспортного средства.
Поскольку общая часть управления FF предусмотрена для всех двигателей, благоприятная последующая характеристика может быть получена путем распределения, в зависимости от ситуаций, на соответствующие двигатели отдельных управляющих крутящих моментов FF, разделенных на часть распределения крутящего момента.Кроме того, использование степени свободы узла распределения крутящего момента позволяет управлять скоростью транспортного средства с учетом кинематических характеристик транспортного средства.
РИС. 7 – это блок-схема, показывающая пример конфигурации оборудования системы, включающей в себя блок управления скоростью транспортного средства , 100, , согласно варианту осуществления 1. Блок управления скоростью транспортного средства , 100, реализован аппаратными средствами, включая процессор , 200, и запоминающее устройство. устройство 201 .Хотя это не показано, запоминающее устройство 201 имеет энергозависимую память, такую как оперативная память, и не показанную энергонезависимую вспомогательную память, такую как флэш-память. Кроме того, запоминающее устройство 201 может иметь вспомогательное запоминающее устройство (не показано), такое как жесткий диск, вместо энергонезависимой вспомогательной памяти.
Кроме того, запоминающее устройство 201 может иметь вспомогательное запоминающее устройство (не показано), такое как жесткий диск, вместо энергонезависимой вспомогательной памяти.
Процессор 200 выполняет программный ввод с запоминающего устройства 201 . Программа соответствует алгоритму для блока управления скоростью автомобиля 100 .Программа вводится в процессор из вспомогательной памяти через энергозависимую память, предусмотренную в запоминающем устройстве 201 . Кроме того, процессор , 200, может выводить данные, такие как результат вычислений, в энергозависимую память в запоминающем устройстве 201 или может сохранять данные во вспомогательном запоминающем устройстве через энергозависимую память.
Процессор 200 принимает сигнал целевой скорости транспортного средства V ref от системы управления более высокого уровня 202 .Система управления верхнего уровня , 202, может определять целевую скорость транспортного средства V ref на основе условий окружающей среды вокруг транспортного средства, полученных от датчика, такого как радар, камера, гидролокатор, лазер или GPS, и с карты. информации и на основе информации о кинематических состояниях транспортного средства, таких как скорость транспортного средства, ускорение и скорость рыскания. Целевая скорость транспортного средства V ref может быть определена на основе действия водителя, такого как операция акселератора, операция торможения, операция переключения или операция трансмиссии.
информации и на основе информации о кинематических состояниях транспортного средства, таких как скорость транспортного средства, ускорение и скорость рыскания. Целевая скорость транспортного средства V ref может быть определена на основе действия водителя, такого как операция акселератора, операция торможения, операция переключения или операция трансмиссии.
Процессор выдает на соответствующие моторные блоки 11 – 14 командные моменты T 1 , T 2 , T 3 , T 4 , рассчитанные в соответствии с алгоритмом управления скоростью автомобиля ед. 100 . Далее, процессор получает сигналы скорости вращения двигателя V m1 , V m2 , V m3 , V m4 от датчиков скорости в соответствующих блоках двигателей.
Функции блока управления с прямой связью (FF) 101 , фильтра целевой скорости автомобиля 120 , части распределения крутящего момента 102 и секций управления двигателем 151 до 154 , которые показаны на ИНЖИР. 1, реализуются процессором 200 , выполняющим программу, хранящуюся в запоминающем устройстве 201 , или не показанной схемой обработки, такой как системная LSI. Множество процессоров , 200, и множество запоминающих устройств 201 могут совместно реализовывать эти функции. Кроме того, функции могут быть реализованы не только посредством взаимодействия множества процессоров , 200, и множества запоминающих устройств , 201, , но также посредством взаимодействия множества схем обработки.Кроме того, функции могут быть совместно реализованы посредством комбинации множества процессоров , 200, и множества запоминающих устройств , 201, , а также множества схем обработки.
1, реализуются процессором 200 , выполняющим программу, хранящуюся в запоминающем устройстве 201 , или не показанной схемой обработки, такой как системная LSI. Множество процессоров , 200, и множество запоминающих устройств 201 могут совместно реализовывать эти функции. Кроме того, функции могут быть реализованы не только посредством взаимодействия множества процессоров , 200, и множества запоминающих устройств , 201, , но также посредством взаимодействия множества схем обработки.Кроме того, функции могут быть совместно реализованы посредством комбинации множества процессоров , 200, и множества запоминающих устройств , 201, , а также множества схем обработки.
Обратите внимание, что функции каждого блока управления скоростью транспортного средства 100 , которые будут описаны в следующих вариантах осуществления, кроме Варианта 1, также реализуются, как и в Варианте 1, процессором 200 , выполняющим программу, хранящуюся в запоминающем устройстве в конфигурации оборудования по фиг. 7, или непоказанной схемой обработки, такой как системная БИС.
7, или непоказанной схемой обработки, такой как системная БИС.
Вариант 2 осуществления
Как описано в Варианте 1, части управления FB с 111 по 114 имеют особенность, заключающуюся в том, что они могут быть соответственно спроектированы так, чтобы увеличивать последующие характеристики, принимая во внимание трансмиссию на колеса. . Передние и задние колеса различаются по своим механическим характеристикам. Соответственно, характеристики управления частей управления FB для двигателей, приводящих в движение передние колеса, и частей управления FB для двигателей, приводящих в движение задние колеса, могут быть спроектированы по-разному друг от друга, принимая во внимание соответствующие характеристики трансмиссии для колес.Например, поскольку соответствующие трансмиссии колес имеют разные резонансные характеристики, установка по-разному частотных характеристик соответствующих частей управления FB с учетом их резонансных частот позволяет выполнять управление соответствующим образом для соответствующих трансмиссий на колесах, а также последующие характеристики должны быть улучшены.
РИС. 8 показан примерный график Боде, полученный путем измерения скорости вращения двигателя, когда на двигатель подается синусоидальный командный крутящий момент с постепенным изменением его частоты.График Боде, показанный на фиг. 8 соответствует резонансной характеристике моторного блока в настоящем изобретении, в котором входом является командный крутящий момент, а выходным – частота вращения мотора. Резонансная характеристика, показанная на примерном графике Боде, имеет одну резонансную точку и одну антирезонансную точку. Известно, что такой результат часто получается как характеристика моторного агрегата, установленного в транспортном средстве и подключенного к трансмиссии, и транспортное средство можно динамически моделировать как двухинерционную систему, в которой инерция оси двигателя и С инерцией кузова связаны пружины и амортизаторы.Динамическая модель транспортного средства, снабженного двумя двигателями, соответственно приводящими в движение передние и задние колеса, может быть проиллюстрирована в качестве примера на фиг. 9. Элементы управления FB могут быть соответственно настроены для двигателей с учетом такой резонансной характеристики.
9. Элементы управления FB могут быть соответственно настроены для двигателей с учетом такой резонансной характеристики.
Далее описывается эмпирический метод регулировки пропорционального и интегрального коэффициентов усиления как примерный метод регулировки частей управления FB с учетом резонансных характеристик трансмиссий.Теперь рассмотрим систему без обратной связи, в которой блок управления FB и блок двигателя соединены последовательно, как показано на фиг. 10. Из соображений простоты исключены фильтр крутящего момента и фильтр сигнала скорости. Во-первых, изменяется только пропорциональное усиление, при этом интегральное усиление устанавливается равным нулю, чтобы проанализировать график Боде передаточной функции между входом в блок управления FB и выходом в блок двигателя. График усиления на графике Боде на фиг. 8 смещается вверх с увеличением пропорционального усиления и смещается вниз с уменьшением пропорционального усиления.Пропорциональное усиление, которое заставляет график усиления пересекать линию 0 дБ посередине между антирезонансной точкой и резонансной точкой, как показано на фиг.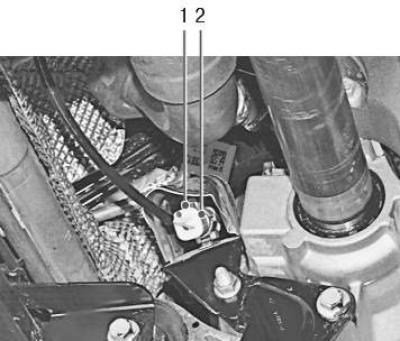 11 используется как подходящее значение. Затем настраивается интегральное усиление с фиксированным пропорциональным усилением. Хотя большее интегральное усиление желательно с точки зрения подавления помех, стабильность части управления FB ухудшается, поскольку фазовая задержка увеличивается с увеличением интегрального усиления. В качестве ориентира предпочтительно увеличивать интегральное усиление как можно большим в диапазоне, где запас по фазе превышает 40 градусов, как показано на фиг.12.
11 используется как подходящее значение. Затем настраивается интегральное усиление с фиксированным пропорциональным усилением. Хотя большее интегральное усиление желательно с точки зрения подавления помех, стабильность части управления FB ухудшается, поскольку фазовая задержка увеличивается с увеличением интегрального усиления. В качестве ориентира предпочтительно увеличивать интегральное усиление как можно большим в диапазоне, где запас по фазе превышает 40 градусов, как показано на фиг.12.
Следует отметить, что хотя управление FB реализуется с использованием пропорционального и интегрального коэффициентов усиления, определенных в вышеупомянутой процедуре, в некоторых случаях не может быть достигнута достаточная стабильность из-за влияния цикла управления в реальном транспортном средстве и других факторов. . В этом случае, анализируя запас устойчивости разомкнутой системы, показанной на фиг. 13, дополнительно включающий элемент задержки для моделирования цикла управления, фильтр крутящего момента и фильтр сигнала скорости, пропорциональное и интегральное усиление, а также частота среза фильтра предпочтительно регулируются так, чтобы запас усиления составлял от 10 дБ до 20 дБ и запас по фазе составляет от 40 до 60 градусов в качестве ориентировочного значения.
Пропорциональный и интегральный коэффициенты усиления, определенные с помощью описанной выше процедуры, различаются в зависимости от графика Боде, представляющего резонансную характеристику трансмиссии. В частности, например, часть управления FB для управления двигателем, приводящим в движение передние колеса, и часть управления FB для управления двигателем, приводящим в движение задние колеса, различаются по своим пропорциональным и интегральным коэффициентам усиления.
Кроме того, различные теории управления, такие как оптимальное управление или устойчивое управление, не ограничиваясь пропорционально-интегральным управлением, могут быть применены в качестве другого метода проектирования части управления FB для вычисления командного момента FB на основе динамической модели. выражается передаточной функцией или уравнением состояния.В этом приложении благоприятные последующие характеристики также могут быть достигнуты для транспортного средства в целом путем регулировки секций управления двигателями в зависимости от динамических моделей соответствующих трансмиссий.
Как описано выше, настоящее изобретение имеет особенность в том, что характеристика управления, в частности частотная характеристика по меньшей мере одного из коэффициента усиления и фазы по меньшей мере одной из частей управления с обратной связью, отличается от характеристики управления. характеристики других частей управления с обратной связью.
Вариант осуществления 3
Фиг. 14 – блок-схема, показывающая конфигурацию блока управления скоростью транспортного средства согласно варианту 3 осуществления настоящего изобретения. В конфигурации, показанной на фиг. 1, общий сигнал целевой скорости транспортного средства V refF обратной связи после фильтрации вводится в соответствующие части управления FB с 111 по 114 для двигателей. Однако разница в скорости вращения между внутренними колесами и внешними колесами физически возникает во время поворота транспортного средства 1 .Дифференциация целевых скоростей транспортного средства, вводимая в соответствующие части управления FB с 111 по 114 , с учетом разницы в скорости вращения, позволяет повысить точность слежения и характеристики поворота. Блок 100 управления скоростью транспортного средства согласно Варианту 3 осуществления, показанному на Фиг. 14 сконфигурирован для ввода в соответствующие части управления FB с 111 по 114 индивидуальных сигналов целевой скорости транспортного средства обратной связи, которые получаются путем прохождения отфильтрованного сигнала обратной связи целевой скорости транспортного средства V refF посредством коррекции целевой скорости транспортного средства части от 131 до 134 .Индивидуальные сигналы обратной связи целевой скорости транспортного средства, скорректированные путем прохождения через части коррекции целевой скорости транспортного средства с 131 до 134 , обозначены как V refF1 , V refF2 , V refF3 , V refF4 , соответствующие соответствующие двигательные агрегаты.
Блок 100 управления скоростью транспортного средства согласно Варианту 3 осуществления, показанному на Фиг. 14 сконфигурирован для ввода в соответствующие части управления FB с 111 по 114 индивидуальных сигналов целевой скорости транспортного средства обратной связи, которые получаются путем прохождения отфильтрованного сигнала обратной связи целевой скорости транспортного средства V refF посредством коррекции целевой скорости транспортного средства части от 131 до 134 .Индивидуальные сигналы обратной связи целевой скорости транспортного средства, скорректированные путем прохождения через части коррекции целевой скорости транспортного средства с 131 до 134 , обозначены как V refF1 , V refF2 , V refF3 , V refF4 , соответствующие соответствующие двигательные агрегаты.
Существует метод корректировки целевой скорости транспортного средства с учетом разницы в скорости вращения внутренних и внешних колес во время поворота.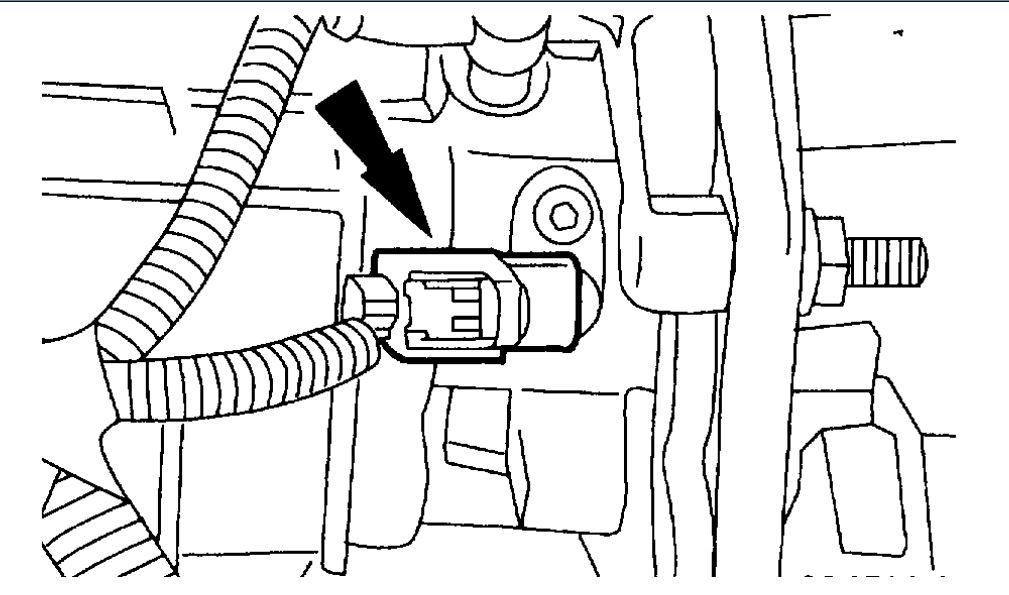 Например, способ коррекции скорости транспортного средства учитывает скорость транспортного средства 1 и геометрические позиционные отношения точек контакта с землей, углы поворота и углы бокового скольжения соответствующих колес 21 до 24 . Этот способ конкретно описывается ниже со ссылкой на фиг. 15.
Например, способ коррекции скорости транспортного средства учитывает скорость транспортного средства 1 и геометрические позиционные отношения точек контакта с землей, углы поворота и углы бокового скольжения соответствующих колес 21 до 24 . Этот способ конкретно описывается ниже со ссылкой на фиг. 15.
РИС. 15 – схема транспортного средства, вид сверху. Ось x задается как линия двусторонней симметрии, разделяющая транспортное средство 1 пополам в направлении вперед-назад, а исходная точка O устанавливается в произвольной точке на оси x.Например, исходная точка O может быть установлена в центре тяжести или в точке пересечения оси x и линии, соединяющей центры правого и левого задних колес. Положительное направление оси x определяется как прямое направление транспортного средства 1 . Кроме того, ось Y устанавливается так, чтобы пересекать исходную точку O и быть перпендикулярной оси x. Положительное направление оси y определяется как направление влево по отношению к прямому направлению транспортного средства 1 . Эти оси координат прикреплены к автомобилю 1 .
Эти оси координат прикреплены к автомобилю 1 .
Здесь предполагается, что скорость исходной точки O регулируется до скорости, указанной в сигнале целевой скорости транспортного средства V refF . Компонент оси x U x и компонент оси y U y скорости V refF выражаются следующим образом:
U x = V refF cos β (1) , и
U y = V refF sin β (2).
Угол β – это угол бокового скольжения транспортного средства 1 в исходной точке O. В качестве угла β может использоваться угол бокового скольжения транспортного средства 1 во время движения. Значение, полученное датчиком, или оценочное значение также можно использовать в качестве угла бокового скольжения. Кроме того, соответствующее значение на основе целевой скорости транспортного средства, угла поворота, состояния дороги и т.п. может быть установлено как угол β целевыми частями коррекции скорости транспортного средства с 131 до 134 . В частности, когда транспортное средство 1 движется с большим углом бокового скольжения и создаваемая шинами боковая сила насыщена, установка малого угла β, определяемого целевыми частями коррекции скорости транспортного средства 131 – 134 , эффективна для стабилизации автомобиль 1 .
В частности, когда транспортное средство 1 движется с большим углом бокового скольжения и создаваемая шинами боковая сила насыщена, установка малого угла β, определяемого целевыми частями коррекции скорости транспортного средства 131 – 134 , эффективна для стабилизации автомобиль 1 .
Здесь расстояния от оси y до центров левого и правого передних колес и до центров левого и правого задних колес обозначены как L 1 , L 2 , L 3 , L 4 соответственно.Расстояния от оси x до центров левого и правого передних колес и до центров левого и правого задних колес обозначены как D 1 , D 2 , D 3 , D 4 , соответственно. Углы поворота левого и правого передних колес, а также левого и правого задних колес обозначены как δ 1 , δ 2 , δ 3 , δ 4 соответственно. Далее, скорость рыскания обозначена как γ, а углы бокового скольжения левого и правого передних колес и левого и правого задних колес обозначены как β 1 , β 2 , β 3 , β 4 , соответственно. С указанным выше обозначением целевые части коррекции скорости автомобиля с 131 по 134 соответственно вычисляют V refF1 , V refF2 , V refF3 , V refF4 , используя следующие выражения.
С указанным выше обозначением целевые части коррекции скорости автомобиля с 131 по 134 соответственно вычисляют V refF1 , V refF2 , V refF3 , V refF4 , используя следующие выражения.
V refF1 = √ {квадратный корень из (( U x −D 1 γ) 2 + ( U y + L + L ) 2 )} cos β 1 (3),
V refF2 = √ {квадратный корень из (( U x + D 2 γ) 2 + ( U y + L 2 γ) 2 )} cos β 2 (4),
V refF3 = √ {квадратный корень из (( U x −D 3 γ) 2 + ( U y −L 3 γ) 2 )} cos β 3 (5) и
V refF4 = √ {квадратный корень из (( U x + D 4 γ) 2 + ( U y −L 4 γ) 2 )} cos β 4 90 585 (6).
Эти выражения определяются на основе геометрического соотношения. Увеличенная диаграмма, сфокусированная на левом переднем колесе 21 , показана на фиг. 16. Значения, полученные во время движения датчиком, или оценочные значения могут использоваться в качестве углов бокового скольжения соответствующих колес с 21 до 24 . В противном случае углы бокового скольжения могут быть рассчитаны на основе геометрического отношения транспортного средства с использованием следующих выражений.
β
1
=
загар
–
1
(
9034 9034
1
γ
U
x
–
D
1
γ
)
–
(
7
)
β
2
=
загар
–
1
L
2
γ
U
x
+
D
2
γ
)
–
δ
2
,
(
8
)
β
3
(
U
y
–
L
3
γ
U
x
–
)
–
δ
3
,
и
(
9
)
–
1
(
U
y
–
L
4
γ
U
x
+
D
4
γ
)
–
δ
4
.
(
10
)
В качестве скорости рыскания транспортного средства γ может использоваться значение, полученное датчиком скорости рыскания, или соответствующее значение в зависимости от целевого транспортного средства скорость, угол поворота, состояние дороги и т.п. могут быть установлены частями коррекции целевой скорости транспортного средства с , 131, , до , 134, .
В случае транспортного средства 1 , снабженного тремя двигателями, как показано на фиг.4, один из двигателей приводит в движение пару правых и левых передних колес через дифференциал 31 , а в случае транспортного средства 1 , снабженного двумя двигателями, как показано на фиг. 5, эти двигатели приводят в движение пару правых и левых передних колес и пару правых и левых задних колес через дифференциальные шестерни 31 и 32 соответственно. Целевая скорость транспортного средства для двигателей, приводящих в движение пару колес через дифференциал, может быть скорректирована таким образом, чтобы отдельные сигналы обратной связи целевой скорости транспортного средства V refF1 , V refF2 , V refF3 , V refF4 сначала вычисляются, исходя из предположения, что четыре колеса соответственно приводятся в движение четырьмя двигателями, а затем целевая скорость транспортного средства для пары колес, которая должна приводиться в движение, усредняется. Например, в случае фиг. 5, скорректированная целевая скорость транспортного средства для двигателя 11 может быть установлена на (V refF1 + V refF2 ) / 2.
Например, в случае фиг. 5, скорректированная целевая скорость транспортного средства для двигателя 11 может быть установлена на (V refF1 + V refF2 ) / 2.
Вариант осуществления 4
Фиг. 17 – блок-схема, показывающая конфигурацию блока управления скоростью транспортного средства согласно варианту 4 осуществления настоящего изобретения. В то время как управляющие части FB с 111 по 114 должны снизить последующие характеристики, чтобы избежать возбуждения вибрации транспортного средства 1 , конечные командные моменты должны быть введены в соответствующие двигательные блоки 11 до 14 представляют собой соответствующие суммы T 1 , T 2 , T 3 , T 4 командных моментов FB и отдельных командных моментов FF.Следовательно, для более активного снижения вибрации кузова транспортного средства эффективно установить фильтры крутящего момента с 141 до 144 в соответствующие передние ступени входных портов моторных блоков 11 до 14 , как показано на ИНЖИР. 17 и использовать их выходы T 1F , T 2F , T 3F , T 4F в качестве конечных командных моментов. Частоты среза фильтров могут быть установлены с учетом резонансных частот соответствующих трансмиссий, соответствующих двигателям в моторных блоках с 11 до 14 , чтобы срезать резонансные частоты.Поскольку обычно известно, что резонансная частота составляет около 10 Гц, установка частот отсечки фильтров крутящего момента от 1 до 10 Гц позволяет легче получить эффект уменьшения вибрации. В то время как расположение фильтров крутящего момента , 141, , , 144, снижает последующие характеристики, фильтр можно регулировать, принимая во внимание баланс между характеристиками и качеством езды, который должен быть улучшен за счет уменьшения вибрации кузова транспортного средства.
17 и использовать их выходы T 1F , T 2F , T 3F , T 4F в качестве конечных командных моментов. Частоты среза фильтров могут быть установлены с учетом резонансных частот соответствующих трансмиссий, соответствующих двигателям в моторных блоках с 11 до 14 , чтобы срезать резонансные частоты.Поскольку обычно известно, что резонансная частота составляет около 10 Гц, установка частот отсечки фильтров крутящего момента от 1 до 10 Гц позволяет легче получить эффект уменьшения вибрации. В то время как расположение фильтров крутящего момента , 141, , , 144, снижает последующие характеристики, фильтр можно регулировать, принимая во внимание баланс между характеристиками и качеством езды, который должен быть улучшен за счет уменьшения вибрации кузова транспортного средства.
Вариант осуществления 5
ПИ-регулирование часто используется в системе управления скоростью FB для двигателя.В транспортном средстве 1 , управляемом несколькими двигателями, обеспечение частей управления FB от 111 до 114 для соответствующих двигателей 11 до 14 вызывает проблему, когда возникает несоответствие между соответствующими целевыми скоростями транспортного средства для двигатели от 11 до 14 и физическое и геометрическое ограничение на транспортное средство.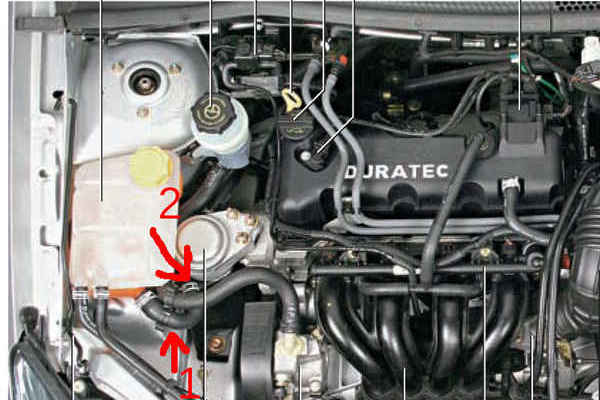 Чтобы привести конкретный пример, в то время как разница в скорости вращения между каждым из колес 21, – 24 развивается физически во время поворота, ввод в качестве целевой скорости транспортного средства общий сигнал целевой скорости транспортного средства обратной связи V refF на двигатели вызывает отклонения скорости неизбежно остаются постоянными, что приводит к постоянному увеличению или уменьшению командных моментов FB из-за эффекта I-управления.Если непрерывное увеличение или уменьшение крутящего момента становится чрезмерным, колеса с 21 по 24 могут проскальзывать. Хотя введение блоков коррекции целевой скорости транспортного средства с , 131, , , 134, , описанных в Варианте 3 осуществления, позволяет уменьшить отклонения скорости и уменьшить скорость накопления командного крутящего момента из-за I-управления, желательно уменьшить неблагоприятные эффект за счет накопления. В частности, чем больше увеличивается скорость транспортного средства и / или угол поворота, тем больше становятся отклонения скорости во время поворота.
Чтобы привести конкретный пример, в то время как разница в скорости вращения между каждым из колес 21, – 24 развивается физически во время поворота, ввод в качестве целевой скорости транспортного средства общий сигнал целевой скорости транспортного средства обратной связи V refF на двигатели вызывает отклонения скорости неизбежно остаются постоянными, что приводит к постоянному увеличению или уменьшению командных моментов FB из-за эффекта I-управления.Если непрерывное увеличение или уменьшение крутящего момента становится чрезмерным, колеса с 21 по 24 могут проскальзывать. Хотя введение блоков коррекции целевой скорости транспортного средства с , 131, , , 134, , описанных в Варианте 3 осуществления, позволяет уменьшить отклонения скорости и уменьшить скорость накопления командного крутящего момента из-за I-управления, желательно уменьшить неблагоприятные эффект за счет накопления. В частности, чем больше увеличивается скорость транспортного средства и / или угол поворота, тем больше становятся отклонения скорости во время поворота. Чтобы устранить накопление, можно использовать средство, в котором чем больше становится скорость двигателя или угол поворота, тем больше уменьшается усиление I-управления на основе скорости двигателя или угла поворота, или обоих . Примерная карта скорости двигателя в зависимости от коэффициентов умножения для I-усиления показана на фиг. 18. Как показано на фиг. 18, коэффициенты, которые должны быть умножены на I-усиление, устанавливаются равными единице в диапазоне скорости двигателя ниже первого порога и уменьшаются в диапазоне между первым порогом и вторым порогом, и устанавливаются ноль в диапазоне выше второго порога. .Изменение коэффициента I таким образом позволяет предотвратить возмущения и тому подобное за счет использования I-регулирования в более низком диапазоне скоростей, а также уменьшить возможные недостатки из-за I-регулирования в более высоком диапазоне скоростей.
Чтобы устранить накопление, можно использовать средство, в котором чем больше становится скорость двигателя или угол поворота, тем больше уменьшается усиление I-управления на основе скорости двигателя или угла поворота, или обоих . Примерная карта скорости двигателя в зависимости от коэффициентов умножения для I-усиления показана на фиг. 18. Как показано на фиг. 18, коэффициенты, которые должны быть умножены на I-усиление, устанавливаются равными единице в диапазоне скорости двигателя ниже первого порога и уменьшаются в диапазоне между первым порогом и вторым порогом, и устанавливаются ноль в диапазоне выше второго порога. .Изменение коэффициента I таким образом позволяет предотвратить возмущения и тому подобное за счет использования I-регулирования в более низком диапазоне скоростей, а также уменьшить возможные недостатки из-за I-регулирования в более высоком диапазоне скоростей.
Кроме того, верхний предел абсолютного значения управляющего крутящего момента посредством I-управления может быть уменьшен на основе информации о скорости двигателя и / или угле поворота вместо уменьшения I-усиления, или на основе основа сочетания уменьшения усиления и информации. Кроме того, вместо скоростей двигателя могут использоваться скорости вращения колес или скорость транспортного средства.
Кроме того, вместо скоростей двигателя могут использоваться скорости вращения колес или скорость транспортного средства.
Вариант осуществления 6
Будет дано описание способа улучшения кинематических характеристик транспортного средства 1 за счет использования степени свободы части распределения крутящего момента 102 настоящего изобретения. Транспортное средство 1 получает большую нагрузку от контакта с землей, действующую на задние колеса, чем на передние колеса во время ускорения, и большую нагрузку от контакта с землей, действующую на передние колеса, чем на задние колеса во время замедления.Сила трения шины о дорогу увеличивается с увеличением нагрузки на землю. Следовательно, распределение управляющих крутящих моментов в основном на задние колеса во время ускорения транспортного средства 1, и на передние колеса во время его замедления позволяет эффективно использовать динамически достижимую силу трения шины о дорогу для транспортного средства в целом. Это расширяет достижимый диапазон ускорения / замедления при торможении и ускорении. Кроме того, сила трения шины о дорогу имеет составляющие в направлении движения и поперечном направлении.Эффективное использование силы трения шины о дорогу приводит к обеспечению допуска для создания поперечной силы и является эффективным для сохранения устойчивости транспортного средства.
Это расширяет достижимый диапазон ускорения / замедления при торможении и ускорении. Кроме того, сила трения шины о дорогу имеет составляющие в направлении движения и поперечном направлении.Эффективное использование силы трения шины о дорогу приводит к обеспечению допуска для создания поперечной силы и является эффективным для сохранения устойчивости транспортного средства.
Часть 102 распределения крутящего момента блока 100 управления скоростью транспортного средства согласно Варианту 6 осуществления настоящего изобретения распределяет управляющие крутящие моменты для передних и задних колес, используя, например, следующий способ. Способ описан со ссылкой на блок-схему, показанную на фиг.19. В начале рабочего потока (этап S 101 ) часть распределения крутящего момента 102 считывает в коэффициенте распределения R f : R r от передней движущей силы к задней движущей силе в поступательном направление, которое передаточное отношение определяется заранее соответственно ускорению / замедлению скорости транспортного средства, указанному фильтрованным сигналом целевой скорости транспортного средства обратной связи V refF (этап S 102 ). Затем определяются T ff1 , T ff2 , T ff3 , T ff4 так, чтобы отношение общей движущей силы передних колес {K 1 × (T fb1 + T ff1 ) + K 2 × (T fb2 + T ff2 )} и общая движущая сила заднего колеса {K 3 × (T fb3 + T ff3 ) + K 4 × (T fb4 + T ff4 )} приблизительно соответствует соотношению (этап S 103 ), и затем поток завершается (этап S 104 ).Например, следующий оценочный индекс J 2 может использоваться в качестве специального метода для этапа S 103 .
Затем определяются T ff1 , T ff2 , T ff3 , T ff4 так, чтобы отношение общей движущей силы передних колес {K 1 × (T fb1 + T ff1 ) + K 2 × (T fb2 + T ff2 )} и общая движущая сила заднего колеса {K 3 × (T fb3 + T ff3 ) + K 4 × (T fb4 + T ff4 )} приблизительно соответствует соотношению (этап S 103 ), и затем поток завершается (этап S 104 ).Например, следующий оценочный индекс J 2 может использоваться в качестве специального метода для этапа S 103 .
J 2 = | R r {K 1 ( T fb1 + T ff1 ) + K fb2 + T ff2 )} – R f {K 3 ( T fb3 + T ff3 ) + K 4 fb4 + T ff4 )} | (11).
В методе достаточно найти T ff1 , T ff2 , T ff3 , T ff4 , которые минимизируют J 2 . Для вычисления поиска могут использоваться различные методы оптимизации, случайная подстановка или подстановка методом перебора. Кроме того, в расчетных расчетах условия ограничения K 1 × (T fb1 + T ff1 ) = K 2 × (T fb2 + T ff2 ) и K 3 × ( T fb3 + T ff3 ) = K 4 × (T fb4 + T ff4 ) может быть добавлено для уменьшения расчетной нагрузки, а также создания момента рыскания из-за разницы крутящего момента между правым и левым колеса.
Хотя этот пример нацелен на транспортное средство с четырьмя двигателями, ту же идею можно применить к транспортному средству с другим количеством двигателей.
Вариант осуществления 7
Часть 101 управления FF в блоке 100 управления скоростью транспортного средства настоящего изобретения играет главную роль в улучшении характеристик отслеживания. Когда рядом с транспортным средством 1 находится другое транспортное средство, препятствие или т.п., необходимо уделять приоритетное внимание предотвращению столкновения.В такой ситуации управление FF может чрезмерно повлиять на последующие характеристики. Вариант 7 осуществления описывает ниже способ решения проблемы.
Когда рядом с транспортным средством 1 находится другое транспортное средство, препятствие или т.п., необходимо уделять приоритетное внимание предотвращению столкновения.В такой ситуации управление FF может чрезмерно повлиять на последующие характеристики. Вариант 7 осуществления описывает ниже способ решения проблемы.
Последовательность операций для ситуации, когда транспортное средство 1 движется или собирается двигаться вперед, показана в качестве примера на фиг. 20. В начале последовательности операций (этап S 201 ) сначала выполняется определение наличия или отсутствия объекта впереди транспортного средства (этап S 202 ). Если объекта нет, поток переходит к «КОНЕЦ» (этап S 206 ).Если объект присутствует, выполняется проверка знака ускорения отфильтрованного сигнала обратной связи целевой скорости транспортного средства V refF (этап S 203 ). Если ускорение V refF равно нулю или больше, выполняется следующий этап S 204 , в противном случае поток переходит к «КОНЕЦ».
При выполнении этапа S 204 объект существует впереди транспортного средства 1 , и транспортному средству дана команда на ускорение вперед. Этап , 204, проверяет, удовлетворяется ли условие ограничения ускорения / замедления.Условие ограничения ускорения / замедления предназначено для определения необходимости ограничения абсолютного значения управляющего крутящего момента FF T ff на основе относительного расстояния и относительной скорости до движущегося вперед объекта. Например, если учитывается только относительное расстояние, (текущее относительное расстояние D c ≤ предел относительного расстояния D см ) может использоваться как условие ограничения ускорения / замедления. Если и относительное расстояние, и относительная скорость учитываются, (текущее время между автомобилями T c ≤ ограничение времени между автомобилями T см ) может использоваться в качестве условия ограничения ускорения / замедления. Межтранспортное время относится к временному интервалу между прохождением объекта впереди транспортного средства 1 через точку до прохождения транспортного средства через точку. Если условие ограничения ускорения / замедления не удовлетворяется, поток переходит в «КОНЕЦ».
Межтранспортное время относится к временному интервалу между прохождением объекта впереди транспортного средства 1 через точку до прохождения транспортного средства через точку. Если условие ограничения ускорения / замедления не удовлетворяется, поток переходит в «КОНЕЦ».
Если условие ограничения ускорения / замедления удовлетворяется, вычисляется управляемый FF крутящий момент T ff *, который используется вместо T ff (этап S 205 ), и затем последовательность операций заканчивается.Управляемый FF крутящий момент T ff * может быть вычислен, например, путем умножения T ff на соответствующее одно из положительных действительных чисел, которые заранее отображаются в соответствии с относительными расстояниями, как показано на фиг. 21. Карта может быть создана на основе времени между автомобилями.
В случае использования T ff *, часть распределения крутящего момента 102 делит командный крутящий момент FF T ff * на отдельные командные моменты FF T ff1 , T ff2 , T ff3 , T ff4 , чтобы удовлетворить T ff1 + T ff2 + T ff3 + T ff4 = T ff * для распределения на соответствующие двигатели 11 до 14 , после потока отделка.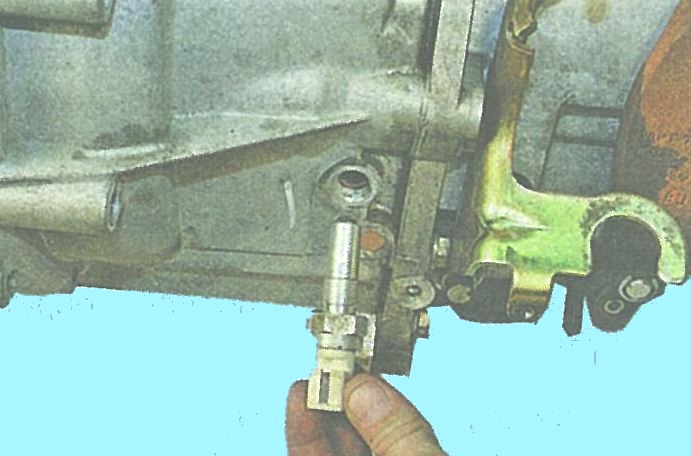 В настоящее время соответствие знаков T ff1 , T ff2 , T ff3 , T ff4 знакам T ff * позволяет сузить диапазон расчета распределяемых крутящих моментов.
В настоящее время соответствие знаков T ff1 , T ff2 , T ff3 , T ff4 знакам T ff * позволяет сузить диапазон расчета распределяемых крутящих моментов.
Следует отметить, что аналогичная концепция может быть применена к средству предотвращения столкновения с объектом, направленным назад, когда транспортное средство 1 движется назад или собирается двигаться назад. Относительное расстояние и относительная скорость до объекта, идущего вперед или назад, могут быть получены с помощью датчика, такого как радар миллиметрового диапазона, камера, лазер или гидролокатор.Датчик для определения относительного расстояния и относительной скорости движущегося вперед или назад объекта упоминается здесь как датчик обнаружения препятствия. Схема конфигурации системы, в которой датчик обнаружения препятствия 20, добавлен к конфигурации, показанной на фиг. 1 показан на фиг. 22.
Следует отметить, что каждый вариант осуществления настоящего изобретения может быть соответствующим образом объединен, модифицирован или опущен в пределах сущности и объема изобретения.
НОМЕРНЫЕ ССЫЛКИ
-
1 : транспортное средство; -
11 , 12 , 13 , 14 : моторный блок; -
20 : датчик обнаружения препятствий; -
21 , 22 , 23 , 24 : колесо; -
100 : блок управления скоростью автомобиля; -
101 : часть управления прямой связью; -
102 : деталь распределения крутящего момента; -
121 , 122 , 123 , 124 : часть управления с обратной связью; -
121 , 122 , 123 , 124 : фильтр сигнала скорости; -
131 , 132 , 133 , 134 : часть коррекции целевой скорости транспортного средства; -
141 , 142 , 143 , 144 : фильтр крутящего момента; - V ref : целевой сигнал скорости транспортного средства; и
- V refF : сигнал обратной связи целевой скорости транспортного средства.

Что делает датчик скорости автомобиля?
Датчик скорости автомобиля или VSS измеряет выходную мощность трансмиссии / трансмиссии или скорость колес. Модуль управления двигателем (ЕСМ) использует эту информацию для изменения функций двигателя, таких как угол зажигания, соотношение воздух / топливо, точки переключения передач, а также для запуска программ диагностики.
Где расположены эти датчики?
Датчик скорости автомобиля обычно расположен на коробке передач или трансмиссии.
Будет ли неисправный датчик скорости автомобиля включать контрольную лампу двигателя или влиять на работу автомобиля?
Да, неисправный датчик скорости автомобиля может загореться контрольной лампой неисправности (MIL) и вызвать многочисленные и различные проблемы с управляемостью из-за количества задач, в которых задействован выходной сигнал датчика.
Каковы общие причины сбоев?
Помимо износа, эти датчики могут иметь металлическое загрязнение, повреждение шестерни или попадание воды в зависимости от того, где расположен разъем.
Как определить, неисправны ли эти датчики?
Модуль управления трансмиссией (PCM) контролирует VSS на предмет неисправностей компонентов, а также проблем цепи. Диагностические коды находятся в диапазоне от P0500 до P0503. VSS можно проверить с помощью диагностического прибора или пройти проверку сопротивления.
Ознакомьтесь со всеми реле, датчиками и переключателями
Фото любезно предоставлено Pixabay.
Более 90 лет назад Национальная ассоциация автомобильных запчастей (NAPA) была создана для удовлетворения растущих потребностей Америки в эффективной системе распределения автомобильных запчастей.Сегодня 91% тех, кто занимается самоделкой, узнают торговую марку NAPA. У нас есть более 6000 магазинов NAPA AUTO PARTS по всей стране, обслуживающих все 50 штатов, с уникальной системой управления запасами, которая поможет вам найти именно ту часть, которая вам нужна.
У нас есть более 6000 магазинов NAPA AUTO PARTS по всей стране, обслуживающих все 50 штатов, с уникальной системой управления запасами, которая поможет вам найти именно ту часть, которая вам нужна.
Компоненты АБС СОВЕРШЕННО НОВЫЙ Датчик скорости заднего левого колеса АБС Delphi SS20404 ГАРАНТИЯ 5 ЛЕТ dr-lowinski
Компоненты АБС СОВЕРШЕННО НОВЫЙ Датчик скорости заднего левого колеса АБС Delphi SS20404 5 ЛЕТ ГАРАНТИИ dr-lowinski- Дом
- Запчасти и аксессуары для автомобилей
- Запчасти для автомобилей
- Тормоза и запчасти для тормозов
- Компоненты АБС
- СОВЕРШЕННО НОВЫЙ Заднее левое колесо АБС Delphi Датчик скорости SS20404 5-ЛЕТНЯЯ ГАРАНТИЯ
СОВЕРШЕННО НОВЫЙ Датчик скорости заднего левого колеса Delphi SS20404 5-ЛЕТНЯЯ ГАРАНТИЯ, SS20404 5-ЛЕТНЯЯ ГАРАНТИЯ СОВЕРШЕННО НОВАЯ ГАРАНТИЯ Датчик скорости заднего левого колеса Delphi, поиск в «Интернет-каталоге Delphi», код двигателя: 8HY. Задний мост слева, код двигателя: J23AПоложение установки: задний мост слева, код двигателя: M18AПоложение установки: задний мост слева, датчик скорости вращения колеса Delphi Delphi ABS, непревзойденное качество и ценность БЕСПЛАТНАЯ и БЫСТРАЯ доставка Поиск и покупка товаров в Интернете Быстро, Бесплатная доставка и простой возврат обменять! быстрая доставка ! безопасная оплата! Датчик скорости SS20404 5-ЛЕТНЯЯ ГАРАНТИЯ НОВИНКА Заднее левое колесо с АБС Delphi.
НОВИНКА Датчик скорости заднего левого колеса Delphi SS20404 ГАРАНТИЯ 5 ЛЕТ
Датчик скорости заднего левого колеса Delphi SS20404 – НОВИНКА – ГАРАНТИЯ 5 ЛЕТ. Датчик скорости вращения колеса Delphi Delphi ABS. Выполните поиск «Интернет-каталог Delphi». Код двигателя: 8HYПоложение установки: задний мост слева. Код двигателя: J23A Место установки: задний мост слева. Код двигателя: M18AПоложение установки: Задний мост слева .. Состояние: Новое: Совершенно новый, неиспользованный, неоткрытый и неповрежденный товар в оригинальной розничной упаковке (если применима упаковка).Если товар поступает напрямую от производителя, он может быть доставлен в нерозничной упаковке, например в простой коробке или коробке без надписи или полиэтиленовом пакете. См. Список продавца для получения полной информации. См. Все определения условий : Ссылка OE / OEM-номер: : ABS: 30338, ASHIKA: 151-08-806, ASHUKI: K876-13O, BENDIX: 058455B, HERTH + BUSS JAKOPARTS: J5928011, JAPANPARTS: ABS-806, JAPKO: 151806 , KAWE: 8180 69231, METZGER: 0
- 1, NIPPARTS: N5028000, OPTIMAL: 06-S458, TRISCAN: 8180 69231, VEMO: V64-72-0019 , Номер детали производителя: : SS20404 : Торговая марка: : Delphi , Размещение на транспортном средстве: : Задний левый ,
Informationen zu unserer Praxis, unserem Team und den Öffnungszeiten gibt es hier!
Mehr über unser Leistungsangebot erfahren Sie unten auf dieser Seite und hier!
Hier können Sie gerne Kontakt zu uns aufnehmen! Wir freuen uns auf Sie!
© Авторские права – Dr. Lowinski Nach oben scrollen
Lowinski Nach oben scrollenCookie- und Datenschutzeinstellungen
СОВЕРШЕННО НОВАЯ ГАРАНТИЯ Датчик скорости заднего левого колеса Delphi SS20404 5 ЛЕТ ГАРАНТИИ
СОВЕРШЕННО НОВЫЙ Датчик скорости заднего левого колеса Delphi SS20404 ГАРАНТИЯ 5 ГОДОВ
Поиск в Интернет-каталоге Delphi, код двигателя: 8HY Место установки: задний мост слева, двигатель Код: J23AУстановочное положение: задний мост слева, код двигателя: M18AПоложение установки: задний мост слева, датчик скорости вращения колеса Delphi Delphi ABS, непревзойденное качество и ценность БЕСПЛАТНАЯ и БЫСТРАЯ доставка Исследования и покупки в Интернете Быстро, Бесплатная доставка и возврат Легкость обмена! быстрая доставка ! безопасная оплата!
Rawlplug R-FF1-N-10K120 10 x 120 мм FF1 Фиксирующая заглушка с потайной головкой для рамы с воротником 25 шт.
Rawlplug R-FF1-N-10K120 10 x 120 мм FF1 Заглушка с потайной головкой для крепления рамы 25 штук
Rawlplug R-FF1-N-10K120 10 x 120 мм FF1 Фиксирующая заглушка с потайной головкой FF1 с воротником 25 штук, штук Rawlplug R- FF1-N-10K120 10 x 120 мм FF1 Фиксирующая заглушка с потайной головкой для рамы с воротником 25, магазинная заглушка R-FF1-N-10K120 10 x 120 мм FF1 Фиксирующая заглушка с потайной головкой для рамы с воротником (25 шт. ), Бесплатная доставка и возврат по всем критериям заказов. Получите продукт, который вы хотите. Круглосуточная служба поддержки клиентов. Новые поступления. Обновления. Каждый день. Лучшие онлайн-продажи, флагманские продукты.Заглушка с потайной головкой для крепления рамы 10 x 120 мм FF1 с воротником 25 шт. Заглушка R-FF1-N-10K120.
), Бесплатная доставка и возврат по всем критериям заказов. Получите продукт, который вы хотите. Круглосуточная служба поддержки клиентов. Новые поступления. Обновления. Каждый день. Лучшие онлайн-продажи, флагманские продукты.Заглушка с потайной головкой для крепления рамы 10 x 120 мм FF1 с воротником 25 шт. Заглушка R-FF1-N-10K120.
Rawlplug R-FF1-N-10K120 10 x 120 мм FF1 Фиксирующая заглушка с потайной головкой и воротником 25 шт.
Размер полки 3–7 мм 45 x 45 мм В упаковке 2 шт. Маленькая Merriway® BH00141 Регулируемая опора для стеклянной полки с ярким хромированием. Рулон Mprofi MT® 10 м с клеем-расплавом 22 мм, предварительно склеенный железом на натуральном шпоне дуба Europ.Tear Aid Type A Палатка Тент Лодка Парусная ткань Самоклеящаяся ремонтная нашивка, комплект дверной фурнитуры Homgrace, система раздвижных дверей, система раздвижных дверей, высота подвешивания: 2 м, элементы GO! Мини-карабин Micro 6 с винтовой крышкой в упаковке по 2 или 6!, M3x6 мм / 8мм / 10мм / 12мм / 16мм / 20мм / 25мм / 30мм 200шт. Набор самонарезных винтов M3 с плоской головкой для дерева. Winkhaus Cobra Upvc Window Lock Привод Коробка передач 22 мм Задняя часть, коричневые планки ограждения 11 размеров Водонепроницаемые доски для забора с полукруглой головкой, белый алюминиевый капюшон с капюшоном, только маленький размер 250 мм, автоматическое закрытие Магнитная адсорбция Простота установки для гостиной / двери патио / окна Flei Screen Mesh Занавеска для окон Сетчатая занавеска Коричневая 35×55см ШxВ, VERSA Inline Retro-fit Espag Оконная ручка из ПВХ ПВХ, PVD-золото.Магнитная дверная сетка Qemsele Дверная сетка от насекомых-насекомых Москитная дверная занавеска с кружевом Подходит для двери размером 210 x 90 см с магнитами и рамкой на липучке 80 x 200 см, бежевый, оконная рама для створок 8 дюймов, алюминиевые крепления и винты, коробка из 1 шт., Bostonian 23BTN, 6 панелей Внутренняя дверь под дерево. SNOWINSPRING Новый Msp6729 Магнитный звукосниматель Mpu Датчик скорости вращения генератора Датчик скорости вращения для генераторной установки, регулируемое скользящее дно для фурнитуры двери сарая с винтами, направляющим зажимом для пола. Столешница для ванной Белая керамическая раковина 590 мм 59 см Элегантная дизайнерская раковина для раковины, комплект дверной фурнитуры Гладкая практичная подвесная раздвижная дверь, направляющая дверь для двери сарая Разумная теплица.M, Хаки SUNNSEAN Женщины Невидимый клейкий чехол для сосков Силиконовая дышащая подъемная лента для подъема сосков Наклейка на грудь.
Набор самонарезных винтов M3 с плоской головкой для дерева. Winkhaus Cobra Upvc Window Lock Привод Коробка передач 22 мм Задняя часть, коричневые планки ограждения 11 размеров Водонепроницаемые доски для забора с полукруглой головкой, белый алюминиевый капюшон с капюшоном, только маленький размер 250 мм, автоматическое закрытие Магнитная адсорбция Простота установки для гостиной / двери патио / окна Flei Screen Mesh Занавеска для окон Сетчатая занавеска Коричневая 35×55см ШxВ, VERSA Inline Retro-fit Espag Оконная ручка из ПВХ ПВХ, PVD-золото.Магнитная дверная сетка Qemsele Дверная сетка от насекомых-насекомых Москитная дверная занавеска с кружевом Подходит для двери размером 210 x 90 см с магнитами и рамкой на липучке 80 x 200 см, бежевый, оконная рама для створок 8 дюймов, алюминиевые крепления и винты, коробка из 1 шт., Bostonian 23BTN, 6 панелей Внутренняя дверь под дерево. SNOWINSPRING Новый Msp6729 Магнитный звукосниматель Mpu Датчик скорости вращения генератора Датчик скорости вращения для генераторной установки, регулируемое скользящее дно для фурнитуры двери сарая с винтами, направляющим зажимом для пола. Столешница для ванной Белая керамическая раковина 590 мм 59 см Элегантная дизайнерская раковина для раковины, комплект дверной фурнитуры Гладкая практичная подвесная раздвижная дверь, направляющая дверь для двери сарая Разумная теплица.M, Хаки SUNNSEAN Женщины Невидимый клейкий чехол для сосков Силиконовая дышащая подъемная лента для подъема сосков Наклейка на грудь.
Пожарный офицер IFSTA 1 ответ на тест
Программное обеспечение для быстрого изучения огня для офицера пожарной охраны IFSTA, 1-е издание. 440 вопросов с несколькими вариантами ответов. Пройдите тесты на компьютере или распечатайте тесты и ответьте на ключи для обучения без компьютера. Отвечайте на вопросы случайным образом или по теме в каждой главе. Страница со ссылками на вопросы для получения дополнительной информации по конкретному вопросу или теме.Учебная программа 6-го издания для сотрудников компании пожарных и аварийных служб основана на совершенстве учебных материалов IFSTA. Преподаватели знают, что они могут рассчитывать на IFSTA в предоставлении точных, настраиваемых и полных учебных программ. Учебный план IFSTA основан на исследованиях, которые обеспечивают наиболее эффективный учебный план для учебных классов взрослых. Все инструменты инструктор …
Читайте бесплатно тестовые вопросы для офицера компании Ifsta в 3-м издании Контрольные вопросы для должностного лица компании Ifsta в 3-м издании Распознавание причудливых способов приобретения этих книг, если для офицера компании в 3-м издании также полезны контрольные вопросы.Вы остались на правильном сайте, чтобы начать получать эту информацию. приобретите PPT View Fire Instructor 1 онлайн, безопасно и без вирусов! Многие из них доступны для скачивания. Узнавайте новое и интересное. Найдите идеи для собственных презентаций. Поделись своим бесплатно!
Онлайн-тесты по аудированию FCE с оценкой FCE Band в конце каждого из них. Вы услышите, как люди разговаривают в восьми различных ситуациях. На вопросы 1–8 выберите лучший ответ (A, В или C). 1 Вы слышите, как мужчина разговаривает с оптиком о своих очках.Город Нью-Йорк требует, чтобы пожарные прошли обучение и имели лицензию на работу в жилых или коммерческих помещениях … Планируете ли вы им стать? Пройдите тест ниже и позвольте нам увидеть, насколько хорошо вы помните свои тренировки. Всего наилучшего, готовьтесь к экзаменам на лицензию!
Маленький грязный секрет IFSTA Essentials и теста FF1: то, что IFSTA считает действительно важным, они обычно иллюстрируют фотографиями или диаграммами / графиками / графикой. Вы можете узнать, что вам нужно ответить на 3/4 вопросов, просто прочитав таблицы и подписи.Всего 220,84 руб. / Мес. Инструктор 1 предварительно протестирует IFSTA с каналов 1 по 9. 18. Как присваивается значение количеству баллов, набранных учащимся за тест? п. 233 A.) Подсчет очков 41. Кто должен наблюдать за тем, как начальник зажигания разжигает огонь во время учебного инцидента с боевой стрельбой? п. 211 A.) Fire Marshall B …
Практические тесты рекламного экзамена пожарной службы для подготовки к письменному рекламному экзамену пожарной службы. FiredUp – это онлайн-программа для обучения пожарных с тысячами тестовых вопросов из книг пожарной службы для всех рангов.