Круиз контроль, принцип работы и возможности ⋆ I Love My Car
Автоликбез Всі записи Як це працює
Практически каждый новый автомобиль лет уже десять подряд даже в базовой комплектации имеет круиз-контроль. Название красивое, но что это такое и как им пользоваться знают немногие. Нет, теоретически понятно, что это устройство, которое каким-то образом способно удерживать крейсерскую скорость. А вот принцип работы, как пользоваться, что такое адаптивный круиз-контроль и как установить при необходимости универсальный круиз контроль, знают тем более не все.
Что такое круиз-контроль и немного историиОбычный круиз-контроль уже полвека перестал быть новостью. Его использовали ещё на первых послевоенных Chrysler Imperial с 1958 года. Изобретение устройства приписывают слепому изобретателю-механику Ральфу Титору. Он получил патент на устройство ещё в 1945 году, а называли систему и Cruise control, и Contrоlmatic, и Tоuchomatic, Pressоmatic и Speedоstat.
Говорят, что идея устройства пришла к нему во время поездки в автомобиле, за рулём которого сидел адвокат механика. За разговором водитель отвлекался и никак не мог придерживаться постоянной скорости, что раздражало изобретателя.
Chrysler Imperial’58, первый автомобиль с круиз-контролемРальф Титор был слепым от рождения, но это никак не помешало ему стать президентом Society of Automotive Engineers (Общества автоинженеров) в 1936 году. Будучи уже в возрасте 75 лет, изобретатель получил несколько престижных наград, докторские степени и спокойно мог уйти на покой, но продолжал работать до последнего дня жизни. Уже после смерти Титора, в 1998 году, его имя было внесено в Зал славы автомобильной индустрии, Automotive Hall of Fame.
Ральф Титор. Именно ему мы обязаны появлением круиз контроляВ общем, задача круиз-контроля заключается в поддержании постоянной скорости в пути. Его можно включить или быстро выключить, нажав на педаль тормоза, отрегулировать на определённый скоростной режим. Все это хорошо, но реальные условия движения могут подсунуть любое препятствие начиная от попутного автомобиля, заканчивая мечтательной коровой, вальяжно переходящей дорогу у нас прямо перед капотом. Словом, сильно не расслабишься.
Все это хорошо, но реальные условия движения могут подсунуть любое препятствие начиная от попутного автомобиля, заканчивая мечтательной коровой, вальяжно переходящей дорогу у нас прямо перед капотом. Словом, сильно не расслабишься.
Система Ральфа Титора работала, отталкиваясь от показаний датчика количества оборотов коленвала, и с помощью простейшего электромагнитного клапана могла управлять педалью акселератора или напрямую дроссельной заслонкой карбюратора. Это было удобно, учитывая огромные перегоны на американских пустынных хайвеях. Красота — нога отдыхает, скорость постоянная, водитель просто направляет автомобиль. Главное, не уснуть.
Примерно в те же года выяснили, что устройство не просто даёт возможность расслабиться, но и крепко экономить топливо. Особо на это в те времена внимания не обращали, поскольку в Штатах к экономии бензина с их пятилитровыми V-8 относились с презрением. Но по подсчетам, автомобиль с круизом мог экономить от 4 до 9% топлива.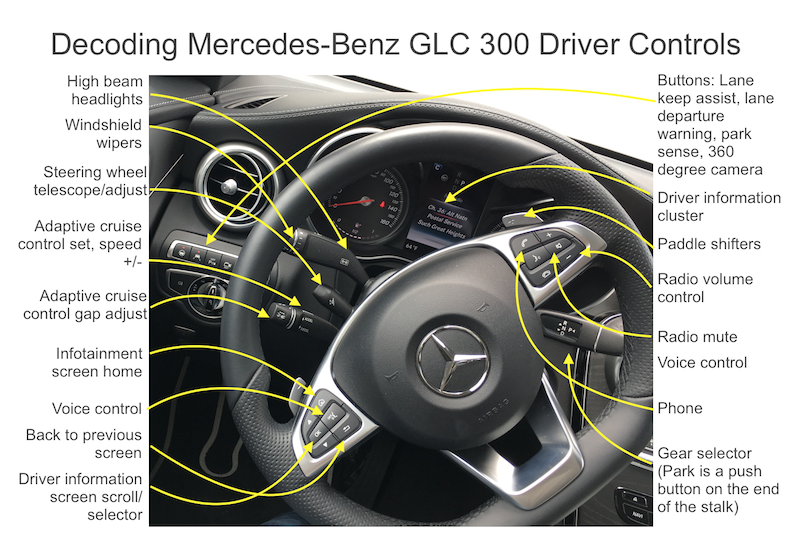 Современные системы способны экономить и до 13-15% горючего, а дизеля и того больше.
Современные системы способны экономить и до 13-15% горючего, а дизеля и того больше.
Схема работы старых и современных простых систем круиз контроля очень проста:
- Сервопривод дроссельной заслонки или педели газа подключён к датчику скорости и оборотов коленвала.
- Мы устанавливаем нужную скорость, а система согласовывает обороты двигателя с углом наклона дросселя (или педали).
- Дальше скорость находится под контролем системы и удерживается на постоянном уровне — при падении оборотов двигателя (скажем, на подъеме) система автоматически увеличит подачу топлива в карбюратор или топливную рампу.
- Как только скорость превысит заданный лимит, круиз-контроль уменьшит подачу топлива и согласует обороты двигателя со скоростью.
- Стоит прикоснуться к педали газа, тормоза, рычагу ручника или специальной кнопке, система отключится и перейдет в штатный режим управления подачей топлива.
Представленная схема сильно упрощена, поскольку есть системы, адаптированные к работе с АКПП, с механической коробкой, но она даёт понятие о том, как работает круиз-контроль в общем.
Об управлении системой КК мы уже кое-что знаем. К примеру то, что включается она кнопкой, а выключается педалью тормоза, газа или ручником. Тем не менее в силу того, что система в Европе устанавливается часто, а используется редко, иногда возникает путаница. Практически во всех автомобиля органы управления круизом расположены либо на мультируле, либо на подрулевом переключателе:
- On/Off — простая активация или деактивация системы, в большинстве автомобилей любое действие с круизом отображается на приборке или дисплее бортового компьютера;
- Set — настройка желаемой крейсерской скорости, тоже обычно отображается на дисплее;
- Cancel — отмена предыдущего действия, но в памяти системы остаётся последняя сохраненная установленная скорость;
- Res, Resume — нажимая эту кнопку, мы активируем последние настройки системы, восстанавливаем данные после сброса кнопкой Cancel;
- стрелки, + или – настраивает верхний порог скорости, в зависимости от модели автомобиля, одиночное нажатие может изменять скорость на 5-10 км/ч.


Может ли круиз контроль экономить топливо
Теоретически может, но все же основная задача системы снимать нагрузку с водителя, снижать степень усталости, повышая уровень безопасности движения. Что касается экономии горючего, то на эту тему ведутся дискуссии до сих пор. Дело в том, что за счёт сглаживания ускорения и замедления, действительно, можно сэкономить немного горючего — чем меньше разгонов и торможений, тем меньше расходуется топлива.
К тому же у каждого двигателя в паре с коробкой передач есть оптимальная скорость для экономичной езды. Учитывая её при установке настроек круиз-контроля, можно добиться неплохой экономии. С другой стороны, некоторые эксперты считают что все то, что мы сэкономили на ровном участке дороги, вылетает в трубу на подъемах и спусках, поскольку системе все равно приходится увеличивать подачу топлива для поддержания скорости на подъеме, а это лишний расход горючего.
Логически понятно, что такой круиз-контроль уже может не просто поддерживать установленную скорость, но и адаптироваться к условиям движения. Система тесно взаимодействует с радарами и датчиками, оценивающими дорожную ситуацию. Радары могут быть лазерного типа, электромагнитного, оптического. Важно не это. Важно то, что система может стать уже в ближайшие годы одним из видов беспилотника.
ACC MB S-Class 2008, система от МерседесПростые системы КК уже научились распознавать впередиидущий автомобиль и реагировать на него, вплоть до того, что наша машина может полностью повторять скоростной режим впереди идущего автомобиля. Более того, устройство способно точно выдерживать дистанцию до ведущей машины. Это полезно во многих случаях, но эффективнее всего применение системы в целях безопасности — оценивая расстояние до передней машины, её скорость, система предотвращает столкновения даёт водителю расслабиться и отдохнуть какое-то время, пока спереди едет адекватный водитель, использовать его как шаблон.
Если же спереди никого нет, тогда водителю приходится самому реагировать на скоростные ограничения, внезапные препятствия, дорожную разметку, но датчики-то все это запросто могут отслеживать! Так почему бы не позволить электронике не только фиксировать обстановку, но и дать доступ к управлению тормозной системой, рулевым управлением и приводом дроссельной заслонки? А это уже называется адаптивным круиз контролем. Вот новое видео от концерна VAG, где наглядно показано как работает адаптивный круиз.
Все чаще даже в недорогих автомобилях появляется система распознавания дорожных знаков, контроля полосы движения, интеграция спутникового навигатора в систему адаптивного круиз-контроля. Собрав все эти данные воедино, мы получаем возможность автоматически контролировать скоростной режим согласно ПДД: система определит, что впереди населенный пункт и плавно сбросит скорость, прочитает ограничение на знаке, получит сигнал со спутникового навигатора об аварии, пробке или ремонтных работах прямо по курсу.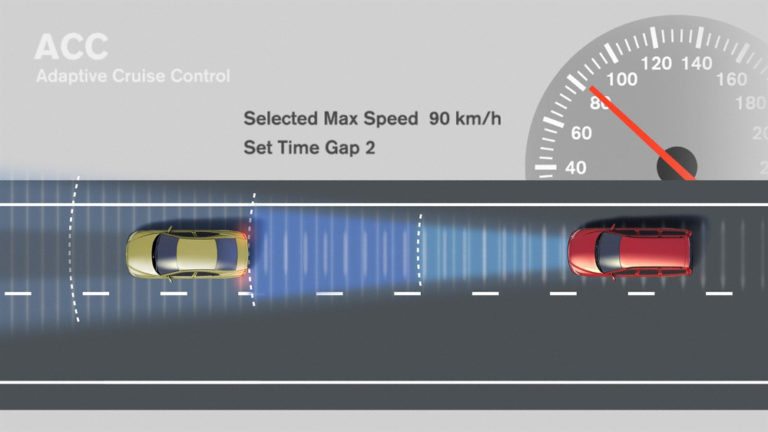
Обработав информацию, а это занимает долю секунды, активированная система приводит в действие исполнительные механизмы — сервоприводы дроссельной заслонки, автоматической коробки передач, при необходимости тормозную систему. В результате мы можем вообще не беспокоиться о соблюдении ограничений.
Система все сделает сама, сбросит скорость в населенном пункте, отреагирует на ограничение скорости и на знак конца ограничения. Опять же, во главу угла здесь ставится эмоциональная разгрузка водителя и безопасность, на которую влияет его состояние.
Аdaptive cruise control, АСС, уже научились эффективно реагировать не только на знаки и состояние дороги, но и на внезапные помехи. При возникновении такого препятствия мгновенно активируется система аварийного торможения и АСС без смущения бьет по тормозам.
В каждой из модели автомобиля эта система может активироваться и срабатывать на разных скоростях, но практически во всех круиз-контроль может снимать с водителя нагрузку при движении в пробках. И это здорово, поскольку снижается степень его утомляемости и риск столкновения, система способна взять всю пробочную рутину по движении в тянучке на себя.
И это здорово, поскольку снижается степень его утомляемости и риск столкновения, система способна взять всю пробочную рутину по движении в тянучке на себя.
Каждый производитель идёт в этом направлении своим путём и может называть систему по-разному. К примеру, для автомобилей Mercedes разработана система Distronic Plus, в концерне VAG похожая система называется Traffic Jam Assist, а у Toyota встречается название Radar Cruise Control. В зависимости от уровня комплектации системы АСС появляются даже на бюджетных моделях — Киа Рио, Ford Focus, Kuga, Huyndai Solaris, Рено Дастер, Логан, Мазда3, Опель Астра и многих других.
Для тех, кто думает как установить круиз контроль на базовую версию, не оборудованную системой с завода, есть возможность купить универсальный круиз-контроль, связав его с электронным блоком управления двигателем, тем самым интегрировав в систему. Возможности универсального круиз-контроля зависят от того, насколько развита система наблюдения за дорожными условиями у базового автомобиля (наличие датчиков, камер, спутникового навигатора).
Возможности универсального круиз-контроля зависят от того, насколько развита система наблюдения за дорожными условиями у базового автомобиля (наличие датчиков, камер, спутникового навигатора).
В качестве примера можно привести немецкую систему круиз-контроля WAECO MagicSpeed MS-50. Это самая недорогая и самая простая система, которая умеет устанавливать скоростной режим, подстраивать скорость плавно, автоматически отключаться при нажатии на педаль тормоза. В составе комплекта:
- Вакуумный сервопривод с тросом.
- Электронный модуль управления.
- Датчик скорости.
- Датчик для педали сцепления.
- Панель управления.
Цена комплекта около $200, при этом можно купить универсальный круиз контроль с расширенным функционалом и установить его на любой автомобиль хоть с механической, хоть с электронной дроссельной заслонкой как с механикой, так и с АКПП. Конечно, такие системы не смогут обеспечить такой уровень автономности и такой слаженности работы всех систем. Но и они смогут снять нагрузку с водителя в дальней дороге.
Конечно, такие системы не смогут обеспечить такой уровень автономности и такой слаженности работы всех систем. Но и они смогут снять нагрузку с водителя в дальней дороге.
Электронные системы в недалеком будущем смогут общаться между собой, на порядок поднимая уровень безопасности. Однако внедрение таких систем едва ли повредит традиционным водительским ценностям. Электронику всегда можно отключить и от души порулить на горном серпантине или отшлифовать навыки вождения на затяжных скоростных поворотах. А там, где рутина и скучная работа педалями, пускай вкалывает автоматика.
#адаптивный #АСС #как работает #круиз-контролькак работает на механике и автомате, как пользоваться, что такое адаптивный КК » АвтоНоватор
Не все современные водители знают, что такое круиз контроль в автомобиле. Однако такая опция принадлежит к довольно старым системам, устанавливаемым на транспортных средствах зарубежного производства. Эта система предназначена для обеспечения комфорта и удобства при управлении автомобилем на загородных трассах. Применение этой опции даёт множество преимуществ, поэтому давайте рассмотрим характеристику круиз-контроля.
Эта система предназначена для обеспечения комфорта и удобства при управлении автомобилем на загородных трассах. Применение этой опции даёт множество преимуществ, поэтому давайте рассмотрим характеристику круиз-контроля.
Содержание
1 Круиз-контроль: что это такое
2 Особенности функционирования на МКПП и АКПП
2.1 Как работает система на «механике»
2.1.1 Видео: круиз-контроль на Suzuki Grand Vitara с МКПП
2.2 Как работает система на «автомате»
3 Разновидности устройства
3.1 Пассивный круиз-контроль и его особенности
3.2 Адаптивный круиз-контроль и его особенности
4 Как пользоваться круиз-контролем
4.1 Видео: как пользоваться круиз-контролем
4.2 Видео: круиз контроль от Hyundau
Круиз-контроль: что это такое
Круиз-контроль – это дополнительная опция ТС, благодаря которой поддерживается скорость на определённом уровне.
Это интересно! На автомобилях отечественного производства система круиз-контроля начала применяться относительно недавно, и только на люксовых комплектациях. При возникновении необходимости её можно установить самостоятельно, что и делают многие владельцы российских автомобилей.
Функционирует система круиз-контроля следующим образом: водитель выезжает за город на трассу, после чего включает опцию поддержки определённого скоростного режима. Независимо от дорожного полотна, система будет держать скорость на определённом показателе. Это даёт возможность водителю убрать ногу с педали газа, а также не контролировать скорость движения.
Внешний вид кнопок управления круиз-контролем, расположенных на подрулевом переключателе
Рассматриваемая система вовсе не является новинкой, но в России она приобрела популярность не так давно.
Изобретение системы круиз-контроля приходится на США, где устройство пользуется огромной популярностью. Сегодня выпуском такой системы занимаются производители разных стран: Германия, Япония, Китай и прочие. В переводе с английского, «Cruise Control» означает «постоянный контроль за скоростью». Однако помимо контролирования скорости и снижения усталости водителя, данная система имеет ещё одно существенное преимущество – это экономия топлива. Многочисленные исследования среди автомобилистов позволили выяснить, что экономия топлива соответствует значениям до 5-7%. Это ещё один повод для того, чтобы укомплектовать своё транспортное средство круиз-контролем.
Это ещё один повод для того, чтобы укомплектовать своё транспортное средство круиз-контролем.
Особенности функционирования на МКПП и АКПП
На ТС с МКПП и АКПП принцип работы круиз-контроля одинаков, за исключением некоторых моментов. Эти моменты заключаются в количестве функций, выполняемых устройствами. Однако рассмотрим первоначально составляющие компоненты устройства, и его принцип действия.
Конструкция простейшего круиз-контроля состоит из сервопривода, который подключается к механизму регулирования дросселя. Именно сервопривод отвечает за подачу определённого количества топливной смеси. Сервопривод являет собой изделие с минусовой обратной связью, применяемым при управлении транспортным средством с механической коробкой передач.
Сервопривод круиз-контроля, отвечающий за подачу топлива
Принцип функционирования устройства заключается в следующем:
- Когда автомобиль движется при неизменном скоростном режиме, то педаль газа находится в одном положении.
- При активации круиз-контроля осуществляется запоминание положения дроссельной заслонки микропроцессорным модулем.
- Если автомобиль движется вверх, то скорость будет падать, если расположение заслонки будет неизменным.
- Чтобы уравновесить скорость передвижения авто до установленного значения, микропроцессор подаёт соответствующую команду на сервопривод, после чего последний корректирует положение заслонки. При этом будет увеличиваться не только скорость, но ещё и повышаться расход топлива.
- Если авто движется на спуске, то скорость будет возрастать, поэтому для её выравнивания микропроцессор подаст сигнал на сервопривод о снижении подачи топлива. Для уравновешивания скорости ТС система использует торможение двигателем, а расход при этом значительно снижается.
- Чтобы отменить заданную скорость, достаточно нажать педаль тормоза.
Для экстренного отключения функции «круиз-контроль» достаточно нажать педаль «тормоз»

Модуль круиз-контроля анализирует полученные сведения, а также сравнивает их с теми, которые задаются водителем. На основании обработки информации создаётся определённый алгоритм управления авто. Теперь разберёмся, какие отличия функционирования системы круиз-контроля для автомобилей с МКПП и АКПП.
На основании обработки информации создаётся определённый алгоритм управления авто. Теперь разберёмся, какие отличия функционирования системы круиз-контроля для автомобилей с МКПП и АКПП.
Как работает система на «механике»
При применении системы круиз-контроля на авто с МКПП происходит упор сектора в ограничитель. Для этого водителю следует перейти с повышенной на пониженную передачу. Кроме того, на «механике» водителю нужно самостоятельно жать на педаль тормоза при возникновении такой необходимости.
На авто с механической коробкой передач при движении на подъём и с активированной опцией круиз-контроля водителю понадобится переходить на пониженную скорость. Если не перейти на неё при движении на крутой подъём, то преодолеть препятствие попросту не получится. Аналогично и с ситуацией, когда авто спускается с горки. Если не переходить на пониженную передачу для торможения двигателем, то мотор будет развивать высокую скорость движения.
Видео: круиз-контроль на Suzuki Grand Vitara с МКПП
 youtube.com/embed/FP82UgquJ2w” allowfullscreen=”allowfullscreen”>
youtube.com/embed/FP82UgquJ2w” allowfullscreen=”allowfullscreen”> Как работает система на «автомате»
На «автомате» при включённой опции круиз-контроля переключаться не понадобится, так как за все действия отвечает устройство. Как только автомобиль развивает нужную скорость, сервопривод зафиксирует расположение заслонки. Если на транспортное средство с АКПП устанавливается система адаптивного типа, то торможение авто происходит автоматически.
Разновидности устройства
Различают два вида рассматриваемых устройств, которые именуются пассивные и адаптивные. Первый вариант являет собой классическую систему, которая применяется на авто с разными типами КПП длительный промежуток времени. Главная функция пассивных устройств кроется в поддержании определённой скорости движения.
Адаптивный вид является наиболее интересным и востребованным, поэтому разберёмся с каждым видом по-отдельности.
Пассивный круиз-контроль и его особенности
Пассивный вид круиз-контроля имеет простейшую конструкцию, и применяется такое изделие преимущественно для поддержания определённой скорости во время передвижения на трассах и автомагистралях. В конструкцию пассивного устройства входят следующие конструктивные элементы:
В конструкцию пассивного устройства входят следующие конструктивные элементы:
- Блок управления. Основное устройство, которое выполняет расчёты во время движения авто при активации опции.
- Датчики.
- Привод дроссельной заслонки или сервопривод.
Комплектация круиз-контроля пассивного вида
Функционирует устройство достаточно просто. Для этого нужно выехать за город на трассу с хорошим дорожным покрытием. Использовать данную опцию не рационально, как в городском движении, так и за городом по трассам с некачественным дорожным покрытием (при наличии выбоин и прочих дефектов на дорогах, а также на грунтовках). Как только авто развивает определённую скорость, которая является оптимальной для данного участка, выполняется включение круиз-контроля (вручную).
После включения этой опции за скорость передвижения отвечает микропроцессор, располагающийся в блоке управления. Датчики определяют скоростной режим транспортного средства, а также положение дроссельной заслонки, и передают информацию в управляющий модуль.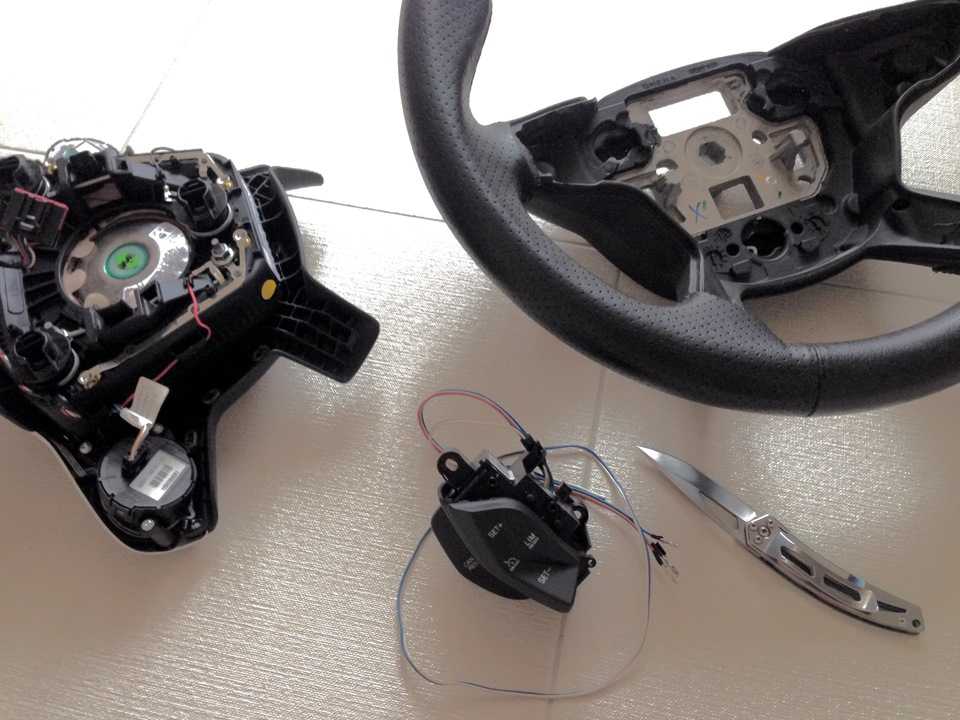 При изменении условий передвижения, чему могут служить подъёмы и спуски, датчики подают соответствующие сигналы.
При изменении условий передвижения, чему могут служить подъёмы и спуски, датчики подают соответствующие сигналы.
Это важно! Другие виды препятствий датчики не фиксируют, поэтому водителю следует соблюдать внимательность при включённом круиз-контроле.
Как только изменяется тип трассы при движении на подъём или спуск, датчики подают сигналы в блок управления. Блок анализирует сигналы, после чего подаёт команду сервоприводу, и происходит закрытие или открытие дроссельной заслонки.
Адаптивный круиз-контроль и его особенности
Адаптивный вид круиз-контроля являет собой новое поколение устройства. Такой тип устройства применяется на современных авто, и предназначается не только для поддержания определённого скоростного режима, но ещё и для учёта дорожной ситуации. Учёт дорожной ситуации осуществляется при помощи вспомогательных устройств: датчики, радары и камеры.
Применение адаптивного круиз-контроля даёт возможность привязать своё транспортное средство к движущемуся впереди автомобилю. Учитывается скорость движущегося впереди автомобиля, а также соблюдается безопасная дистанция, на основании чего блок контроля управляет транспортным средством.
Учитывается скорость движущегося впереди автомобиля, а также соблюдается безопасная дистанция, на основании чего блок контроля управляет транспортным средством.
Расположение и обзор датчиков адаптивного круиз-контроля
Если движущийся впереди автомобиль изменит скорость, то датчики подадут в ЭБУ соответствующие сигналы. Блок проанализирует сигналы, и примет решение о снижении или увеличении скорости. Если впереди нет ТС, то устройство подаёт сигнал о наборе скорости до необходимого значения, после чего поддерживает её.
Это интересно! Существуют также системы круиз-контроля, умеющие считывать дорожную разметку. Такая возможность позволяет водителю исключить необходимость управлять автомобилем.
Адаптивный круиз-контроль обозначается как ACC. Такой вид системы устанавливается на автомобили с завода. Стоимость такой системы достаточно высока, что обусловлено использованием дорогостоящих датчиков, камер и радара. В устройстве используется и современный блок управления, способный вычислять не 2 функции, а несколько десятков. В зависимости от модели устройства, оповещение водителя об аварийной ситуации впереди может осуществляться, как путём подачи визуальных сигналов, так и звуковых.
В зависимости от модели устройства, оповещение водителя об аварийной ситуации впереди может осуществляться, как путём подачи визуальных сигналов, так и звуковых.
Немаловажно отметить и тот факт, что адаптивная система круиз-контроля функционирует в паре с ABS антиблокировочной системой и ESP. Если не будет функционировать одна из этих систем, то активировать круиз-контроль будет невозможно. Включать круиз-контроль адаптивного вида рекомендуется тогда, когда за городом автомобили движутся с равномерной скоростью.
Отображение системы адаптивного круиз-контроля на бортовом компьютере автомобиля
Если в конструкции ТС отсутствует адаптивный тип круиз-контроля, то монтаж его не имеет оправданного смысла. Эта система хотя и является более совершенной и современной, но для поездок за городом вполне хватает пассивного устройства.
Как пользоваться круиз-контролем
Что такое круиз контроль в автомобиле, и для чего он нужен, было детально рассмотрено. Немаловажно разобраться в вопросе о том, как же правильно пользоваться этим устройством.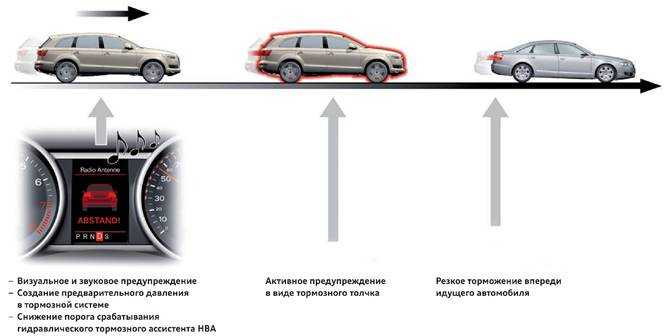 Ведь многие автомобилисты, пересаживаясь на иномарки, не понимают, что это за опция, и как правильно её использовать.
Ведь многие автомобилисты, пересаживаясь на иномарки, не понимают, что это за опция, и как правильно её использовать.
Если на автомобиле круиз-контроль установлен с завода, то кнопки управления этой опцией зачастую располагаются на руле, и лишь изредка на подрулевых переключателях. Если монтаж круиз-контроля осуществляется самостоятельно, то специальный пульт управления с несколькими кнопками устанавливается на руле.
Кнопки управления круиз-контролем, расположенные на мультируле Hyundai
Расположение пульта управления на руле является наиболее удобным, так как в любую секунду можно не только включить опцию, но ещё и отключить её или произвести настройку. Однако некоторые модели автомобилей оснащаются пультами управления, располагающимися на подрулевых переключателях.
Кнопки управления штатным круиз-контролем на Лада Гранта
В зависимости от модели ТС, а также от конструкции устройства, имеются некоторые отличия в управлении. Алгоритм управления круиз-контролем заключается в выполнении следующих манипуляций:
- Для начала нужно разогнать ТС до скорости, на которой планируется осуществлять дальнейшее передвижение. Минимальная скорость, при которой можно включить устройство, составляет 40 км/час.
- Включить опцию. Делается это путём нажатия кнопки в виде тахометра со стрелочкой или переведения регулятора в положение «ON».
Включение системы круиз-контроля осуществляется путём нажатия кнопки с соответствующим значком
- При этом на панели приборов загорится соответствующий индикатор белого или жёлтого цвета, который обычно имеет вид тахометра со стрелочкой. Если устройство было установлено на автомобиль самостоятельно, то никакие индикаторы на панели приборов загораться не будут. Свечение индикатора белым или жёлтым цветом свидетельствует о том, что включено устройство, но ещё не работает данная функция.
Жёлтый значок на приборной панели отображает, что устройство круиз-контроля включено, однако, для его полного функционирования необходимо нажать «SET-«
- Вводится система в действие путём нажатия кнопки «SET» с минусом. На некоторых моделях автомобилей название этой кнопки может отличаться, однако, принцип включения аналогичный.
Автомобилисты, часто передвигающиеся по трассе, не скупятся на установку функции, даже если она не идёт в стандартной комплектации на авто
- При этом индикатор с белого или жёлтого цвета изменится на зелёный, что свидетельствует о функционировании устройства.
Значок зелёного цвета отображает работу функции круиз-контроля
- Если нужно увеличить или снизить скорость передвижения, то можно воспользоваться кнопками в виде плюса и минуса. При нажатии на эти кнопки будет увеличиваться или снижаться скорость движения авто на значение от 1 до 2 км.
 Минимальная скорость, при которой можно включить устройство, составляет 40 км/час.
Минимальная скорость, при которой можно включить устройство, составляет 40 км/час.
Чтобы выключить устройство, следует нажать кнопку «Off». Это полное выключение опции, и выполняется тогда, когда вы въезжаете в город. Экстренный способ отключения осуществляется путём нажатия на педаль тормоза. При этом система переходит в режим готовности (светится белым или жёлтым индикатором). В любой момент можно включить опцию, и продолжить передвижение по трассе. Применяется зачастую, когда нужно преодолеть какое-либо препятствие, сделать остановку и т. п. Ещё один способ выключения устройства – это нажатие на педаль газа. Такой вариант отключения применяется на автомобилях, где установлены адаптивные системы.
п. Ещё один способ выключения устройства – это нажатие на педаль газа. Такой вариант отключения применяется на автомобилях, где установлены адаптивные системы.
Более подробно о том, как обращаться с круиз-контролем на своём автомобиле можно ознакомиться в мануале к вашему транспортному средству.
Рассмотрим некоторые обозначения опций круиз-контроля:
- On – включение.
- Off – отключение.
- Set Accel – установка режима.
- Resume – запоминание скорости.
- Coast – снижение скорости.
Видео: как пользоваться круиз-контролем
Это важно! Производители не рекомендуют включать систему круиз-контроля, когда осуществляется движение по трассе в ночное время суток, а также во время гололёда, дождя или снега. Это может привести к возникновению аварийной ситуации.
Немаловажно упомянуть о том, что круиз-контроль имеет функцию самостоятельного отключения. Для этого служат следующие факторы:
Для этого служат следующие факторы:
- Если возникает резкое ускорение скорости на 5,4 км/час.
- Если на автомобиле с АКПП перевести рычаг в нейтральное положение.
На автомобилях с МКПП при переведении рычага переключения передач круиз-контроль не отключится. Автомобиль будет снижать скорость, но при этом будет слышен звук рёва мотора.
Подводя итог о рассматриваемом устройстве, следует отметить такие достоинства:
- Возможность отдохнуть водителю. При этом водителю можно расслабить только ноги, но не руки или голову.
- Возможность установки устройства на любой автомобиль, даже если он не укомплектован опцией с завода.
- Снижение расхода топлива на 5-7%.
- Использование адаптивного вида устройства позволяет автоматически поддерживать не только скорость, но ещё и дистанцию.
У круиз-контроля, как у практически любой функции, есть и свои минусы:
- При неисправности любого датчика устройства, система не будет функционировать. Особенно это касается адаптивной системы управления.
- Если злоупотреблять таким приспособлением, то у водителей снижается бдительность, что способствует возникновению аварийных ситуаций на дороге.
 Особенно это касается адаптивной системы управления.
Особенно это касается адаптивной системы управления.Видео: круиз контроль от Hyundau
В современном мире американским устройством, поддерживающим постоянную скорость, оснащают даже автомобили бюджетного класса. Несмотря на все свои преимущества рациональность использования подобной системы обусловлена частыми дальними поездками по трассе. Если же эксплуатация автомобиля ведётся в городских условиях, то необходимость в круиз-контроле полностью отсутствует.
- Автор: Андрей
- Распечатать
Оцените статью:
(12 голосов, среднее: 4. 6 из 5)
6 из 5)
Поделитесь с друзьями!
Обсуждения закрыты для данной страницы
Adblock
detector
DIY: модернизация адаптивного круиз-контроля на Volkswagen Tiguan
Перейти к основному содержанию Нам удалось улучшить наш фактор безопасности, модернизировав стандартную систему круиз-контроля в нашем автомобиле до адаптивного круиз-контроля.
Fluidicjoy недавно поделился этим с другими сотрудниками BHP.
Круиз-контроль стал популярным в последнее десятилетие, и теперь в Индии есть довольно много автомобилей бюджетного сегмента, предлагающих эту функцию. Для непосвященных: круиз-контроль — это функция, которая поддерживает заданную скорость автомобиля и позволяет нам убрать ногу с педали акселератора. После включения круиз-контроля мы можем использовать переключатели круиз-контроля для увеличения или уменьшения заданной скорости. Это очень полезно для очень дальних поездок и хороших свободных дорог, где вы можете поддерживать здоровую скорость. Круиз-контроль в большинстве автомобилей, на которых я ездил, имеет минимальный порог около 40 км/ч (у некоторых производителей он может быть ниже). Вечные споры о том, насколько полезен круиз-контроль в Индии, учитывая даже наши дороги нет дисциплинированного, полосного движения , кто-то другой вмешивается и заставляет нас тормозить. У меня довольно много забавных воспоминаний о Круиз-контроле, но чтобы не зацикливаться на этой теме, я поделюсь только одним. Несколько лет назад, когда мы ехали на свадьбу друга в нашей Jetta, на полпути начала мигать лампочка ABS-ESP, и сразу же ход педали тормоза немного увеличился. Было очевидно, что ABS не сработает, но в Руководстве по ремонту Volkswagen говорилось, что гидравлическая тормозная система будет работать идеально, даже если модуль ABS-ESP не работает. Правда, я ездил в Ахмеднагар и обратно и широко использовал круиз-контроль, чтобы активно ускоряться и замедляться, так как штатный ход педали тормоза был неудобным после отключения модуля ABS-ESP.
Это очень полезно для очень дальних поездок и хороших свободных дорог, где вы можете поддерживать здоровую скорость. Круиз-контроль в большинстве автомобилей, на которых я ездил, имеет минимальный порог около 40 км/ч (у некоторых производителей он может быть ниже). Вечные споры о том, насколько полезен круиз-контроль в Индии, учитывая даже наши дороги нет дисциплинированного, полосного движения , кто-то другой вмешивается и заставляет нас тормозить. У меня довольно много забавных воспоминаний о Круиз-контроле, но чтобы не зацикливаться на этой теме, я поделюсь только одним. Несколько лет назад, когда мы ехали на свадьбу друга в нашей Jetta, на полпути начала мигать лампочка ABS-ESP, и сразу же ход педали тормоза немного увеличился. Было очевидно, что ABS не сработает, но в Руководстве по ремонту Volkswagen говорилось, что гидравлическая тормозная система будет работать идеально, даже если модуль ABS-ESP не работает. Правда, я ездил в Ахмеднагар и обратно и широко использовал круиз-контроль, чтобы активно ускоряться и замедляться, так как штатный ход педали тормоза был неудобным после отключения модуля ABS-ESP. Оказалось, что вышел из строя модуль ABS, а не проблема с датчиком скорости вращения колеса, и я все еще использую свои стандартные датчики скорости вращения колеса (тач-дерево!). Итак, возвращаясь к сути, круиз-контроль может быть весьма полезным. если он есть, но не без проблем.
Оказалось, что вышел из строя модуль ABS, а не проблема с датчиком скорости вращения колеса, и я все еще использую свои стандартные датчики скорости вращения колеса (тач-дерево!). Итак, возвращаясь к сути, круиз-контроль может быть весьма полезным. если он есть, но не без проблем.
Проблемы с круиз-контролем
- Непредсказуемый характер индийского движения и дорожных условий.
- Недостаток скорости, дорожная дисциплина.
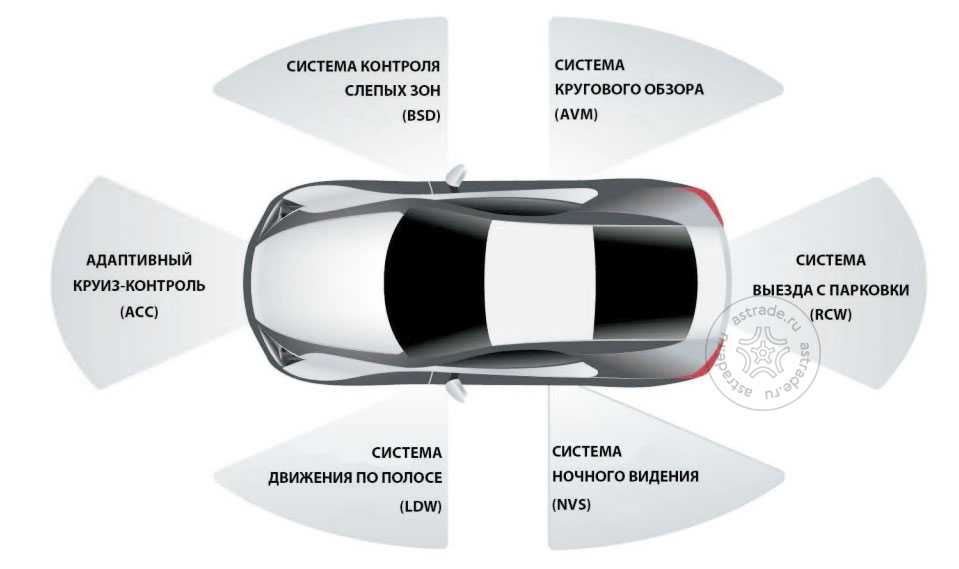
Некоторые из этих проблем не могут быть решены независимо от того, что мы делаем, но я чувствовал, что можно улучшить наш коэффициент безопасности, обновив стандартную систему круиз-контроля в нашей машине до адаптивного круиз-контроля, и что это именно то, о чем эта тема, мой опыт, когда я установил радар в Tiguan и в итоге получил повышение степени автономного вождения. Впервые я испытал множество автономных функций безопасности в Volvo V40, и я был очень впечатлен тем, сколько функций безопасности было загружено в этот автомобиль. В настоящее время дизельный Tiguan имеет только 8 датчиков парковки, в то время как AllSpace и T-Roc имеют радар и камеру слежения за полосой движения, и это изображение является хорошей иллюстрацией различных технологий помощи водителю, используемых в наших современных автомобилях. Я пользуюсь адаптивным круиз-контролем (ACC) уже почти неделю, и хотя реализация была безупречной, у него есть несколько шероховатостей, которые можно сгладить только с помощью интеграции искусственного интеллекта в эти электронные модули управления, и что может быть еще через несколько лет.
В настоящее время дизельный Tiguan имеет только 8 датчиков парковки, в то время как AllSpace и T-Roc имеют радар и камеру слежения за полосой движения, и это изображение является хорошей иллюстрацией различных технологий помощи водителю, используемых в наших современных автомобилях. Я пользуюсь адаптивным круиз-контролем (ACC) уже почти неделю, и хотя реализация была безупречной, у него есть несколько шероховатостей, которые можно сгладить только с помощью интеграции искусственного интеллекта в эти электронные модули управления, и что может быть еще через несколько лет.
Как все это происходило
С тех пор, как несколько лет назад мы приобрели Tiguan, мой отец был очарован несколькими крошечными функциями безопасности, которые были в нем, например, маневренным торможением, которое предотвращало столкновение с мелкими предметами, с помощью датчиков парковки на транспортном средстве. Он задавался вопросом, остановится ли Tiguan, если кто-то внезапно встанет на пути, и этот его вопрос привел к моему исследованию Front Assist, и это то, что он хотел бы иметь, поскольку мы оба испытали это на Volvo раньше. . Я тщательно изучил оборудование, предлагаемое в нашем автомобиле, и, к сожалению, радар был чем-то, чего Volkswagen не предлагал на дизельном Tiguan. Приятным сюрпризом для меня несколько месяцев спустя стало то, что T-Roc и Tiguan AllSpace предлагались не только с радаром, но и с камерой помощи при движении по полосе на переднем стекле, но, что странно, это лишь некоторые из этих функций. были включены Volkswagen, в то время как остальные практически не появляются! На самом деле, я по ошибке сказал нескольким друзьям, что в AllSpace есть ACC, так как я видел несколько функций Radar в AllSpace, но мало ли знал, что они не включены на заводе. Тест-драйв T-Roc был способен поддерживать свою линию только с помощью камер. Я очень хотел модернизировать адаптивный круиз-контроль в нашей машине и начал собирать все второстепенные строительные блоки, чтобы реализовать эту функцию в нашей машине. Мне потребовалось около трех месяцев, чтобы получить радар, подвеску и логотип Volkswagen, совместимый с радаром, и я почти думал, что у меня все это есть, но я ошибался и читал дальше, чтобы увидеть недостающую часть головоломки.
. Я тщательно изучил оборудование, предлагаемое в нашем автомобиле, и, к сожалению, радар был чем-то, чего Volkswagen не предлагал на дизельном Tiguan. Приятным сюрпризом для меня несколько месяцев спустя стало то, что T-Roc и Tiguan AllSpace предлагались не только с радаром, но и с камерой помощи при движении по полосе на переднем стекле, но, что странно, это лишь некоторые из этих функций. были включены Volkswagen, в то время как остальные практически не появляются! На самом деле, я по ошибке сказал нескольким друзьям, что в AllSpace есть ACC, так как я видел несколько функций Radar в AllSpace, но мало ли знал, что они не включены на заводе. Тест-драйв T-Roc был способен поддерживать свою линию только с помощью камер. Я очень хотел модернизировать адаптивный круиз-контроль в нашей машине и начал собирать все второстепенные строительные блоки, чтобы реализовать эту функцию в нашей машине. Мне потребовалось около трех месяцев, чтобы получить радар, подвеску и логотип Volkswagen, совместимый с радаром, и я почти думал, что у меня все это есть, но я ошибался и читал дальше, чтобы увидеть недостающую часть головоломки.
Я откладывал и откладывал эту установку последние несколько месяцев, несмотря на то, что к середине января я уже получил большинство необходимых компонентов. Возможно, я немного боялся переделывать что-то с нуля, и это тоже на почти новой машине с пробегом всего 9000 км и еще 4 годами гарантии, но я решил довериться своим исследованиям. , и более подробно о моем помощнике @N2Autotech. Я был настолько параноиком по поводу поломки обшивки в машине, что даже проводил ночи напролет, изучая руководства по ремонту кузова, чтобы снять внутреннюю и внешнюю обшивку как можно аккуратнее, но вся задача была выполнена менее чем за 8 часов. и это было очень весело, а самым ярким моментом была моя поездка домой без тормозов той ночью!
Обзор этапов
- Установка специального радара дальнего действия Tiguan
- Замена пластикового логотипа Volkswagen
- Снятие внутренней отделки
- Прокладка и проводка радара в соответствии с оригинальным маршрутом CAN Volkswagen 2 2 2
- Установка круиз-контроля
- Калибровка радара
- Снятие защиты компонентов
- Кодирование и адаптация
- Тестовый запуск
Итак, первым и наиболее важным шагом на дизельном Тигуане была физическая установка радара адаптивного круиз-контроля. Расположение радара на дизельном Tiguan находится за передней эмблемой Volkswagen. Я попытался связаться с владельцами AllSpace, и они прислали мне фотографии своего логотипа ACC, и у меня сложилось впечатление, что мой Tiguan идет с таким же логотипом. Оказывается, это другое! Для радара адаптивного круиз-контроля требуется керамический логотип, чтобы обеспечить передачу сигнала и обнаружение транспортных средств и препятствий впереди. И он не только керамический, но и плоский, как щит Капитана Америки. Это невероятно круто, и я даже поделился историей в своем аккаунте в Instagram, спрашивая людей, было ли это 2D или 3D, и этот логотип Volkswagen сумел обмануть около 72% людей, которые считали, что это 3D.
Расположение радара на дизельном Tiguan находится за передней эмблемой Volkswagen. Я попытался связаться с владельцами AllSpace, и они прислали мне фотографии своего логотипа ACC, и у меня сложилось впечатление, что мой Tiguan идет с таким же логотипом. Оказывается, это другое! Для радара адаптивного круиз-контроля требуется керамический логотип, чтобы обеспечить передачу сигнала и обнаружение транспортных средств и препятствий впереди. И он не только керамический, но и плоский, как щит Капитана Америки. Это невероятно круто, и я даже поделился историей в своем аккаунте в Instagram, спрашивая людей, было ли это 2D или 3D, и этот логотип Volkswagen сумел обмануть около 72% людей, которые считали, что это 3D.
Прежде чем установить новый радар, мне пришлось довольно многое убрать из моторного отсека, особенно компоненты воздухозаборника, которые были сильно запылены и грязны. Поиск оптимального маршрута был довольно сложной задачей, учитывая, насколько хорошо защищен брандмауэр двигателя. Затем я начал отвинчивать и отсоединять решетку, которая была довольно пыльной и грязной, поэтому я подумал, что было бы неплохо очистить решетку водой под давлением. Вот как выглядит Tiguan без решетки радиатора, и он точно похож на обрезанные усы.
Затем я начал отвинчивать и отсоединять решетку, которая была довольно пыльной и грязной, поэтому я подумал, что было бы неплохо очистить решетку водой под давлением. Вот как выглядит Tiguan без решетки радиатора, и он точно похож на обрезанные усы.
Затем я приступил к установке радара адаптивного круиз-контроля в предназначенный для него корпус решетки радиатора. С Радаром нужно обращаться очень осторожно и ограничивать каждое горизонтальное движение, иначе Радар потеряет свою калибровку. Теперь забавная часть калибровки заключается в том, что на сегодняшний день ни у одного дилера Volkswagen нет машины или инструмента VAS для калибровки их систем помощи водителю последнего поколения, и мы поговорим об этом ближе к концу.
Вот быстрое изображение обоих логотипов сбоку, и минус 5 баллов для меня за нечистый старый логотип, иначе это было бы очень интересное фото для опроса. Далее пришло время проложить провода от радара в моторном отсеке и проложить их к машине. Я должен сказать, что внутреннее качество обивки и упаковочных материалов на этом MQB CKD было на высшем уровне, с несколькими слоями изоляции для комфорта внутри и вокруг брандмауэра. Когда мы получили эту машину, я был приятно удивлен, увидев, что Volkswagen дал мне кнопку просмотра с правой стороны руля (для будущего использования с виртуальной кабиной) и что-то похожее на кнопку помощи водителю слева, и я почувствовал это позволило бы мне использовать Adaptive Cruise прямо из коробки. К сожалению, я ошибся, и мне нужен был новый набор кнопок для поддержки Adaptive Cruise, как бы тривиально и парадоксально это ни звучало, и это был последний кусочек головоломки.
Я должен сказать, что внутреннее качество обивки и упаковочных материалов на этом MQB CKD было на высшем уровне, с несколькими слоями изоляции для комфорта внутри и вокруг брандмауэра. Когда мы получили эту машину, я был приятно удивлен, увидев, что Volkswagen дал мне кнопку просмотра с правой стороны руля (для будущего использования с виртуальной кабиной) и что-то похожее на кнопку помощи водителю слева, и я почувствовал это позволило бы мне использовать Adaptive Cruise прямо из коробки. К сожалению, я ошибся, и мне нужен был новый набор кнопок для поддержки Adaptive Cruise, как бы тривиально и парадоксально это ни звучало, и это был последний кусочек головоломки.
Задача заключалась в том, чтобы заменить стандартные кнопки, и для этого потребовалось снять подушку безопасности и окружающие накладки, чтобы открутить старый набор кнопок.
Я проделал это с большим терпением и, к счастью, у меня получилось, но если вы попытаетесь сорвать накладки, вы наверняка потерпите неудачу или что-нибудь сломаете. Так что это тоже довольно важная задача, на мой взгляд, и требует легкой руки и хорошего надежного набора инструментов, а также много-много терпения. Вот как выглядит голый корпус рулевого колеса, и он ужасно похож на Polo и Vento, которые, очевидно, продаются по гораздо более низкой цене. Я уверен, что пользователи Tiguan и T-Roc заплатили довольно много, и им бы понравилось что-то, что отличало бы их автомобили от более низких коней, и рулевое колесо R-Line MQB было бы потрясающим в этих автомобилях. Для тех, кто не хочет просто заменять старые кнопки, приобретение нового совместимого колеса по-прежнему является возможным, но в 12 раз более дорогим вариантом.
Так что это тоже довольно важная задача, на мой взгляд, и требует легкой руки и хорошего надежного набора инструментов, а также много-много терпения. Вот как выглядит голый корпус рулевого колеса, и он ужасно похож на Polo и Vento, которые, очевидно, продаются по гораздо более низкой цене. Я уверен, что пользователи Tiguan и T-Roc заплатили довольно много, и им бы понравилось что-то, что отличало бы их автомобили от более низких коней, и рулевое колесо R-Line MQB было бы потрясающим в этих автомобилях. Для тех, кто не хочет просто заменять старые кнопки, приобретение нового совместимого колеса по-прежнему является возможным, но в 12 раз более дорогим вариантом.
Новые кнопки и их проводку необходимо проложить по направляющим в руле, чтобы ничего не оторвалось и не было риска натяжения тросов из-за условий движения.
Электропроводка
Я следовал схеме электропроводки Фольксвагена к Т и взял питание от блока предохранителей сзади, наиболее подходящим образом, и защитил свою установку предохранителем.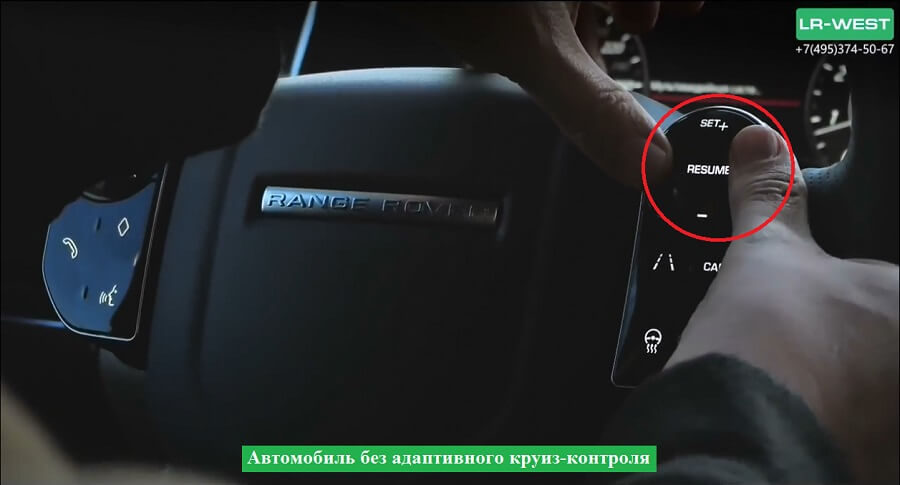 Я даже определил несколько удобных земных точек. Согласно Volkswagen, все оборудование системы помощи водителю (PDC, камера Lane Assist, боковая помощь, адаптивный круиз-контроль) работает на одном предохранителе. Я действительно хорошо провел время, работая с привязями MQB. Они резко контрастировали с разъемами платформы PQ, и по этим мелочам можно определенно оценить, насколько сложна платформа MQB. Чтобы получить доступ к блоку предохранителей, необходимо удалить довольно много разъемов, включая перчаточный ящик, подсветку пространства для ног, и нам также нужно вынуть мозг информационно-развлекательной системы, чтобы снять перчаточный ящик. Определенно не лучший дизайн для снятия и обслуживания электропроводки. В будущем я смогу перейти на мониторинг слепых зон и отслеживание полосы движения, используя ту же линию питания, но я не знаю, когда эти обновления могут воплотиться в жизнь.
Я даже определил несколько удобных земных точек. Согласно Volkswagen, все оборудование системы помощи водителю (PDC, камера Lane Assist, боковая помощь, адаптивный круиз-контроль) работает на одном предохранителе. Я действительно хорошо провел время, работая с привязями MQB. Они резко контрастировали с разъемами платформы PQ, и по этим мелочам можно определенно оценить, насколько сложна платформа MQB. Чтобы получить доступ к блоку предохранителей, необходимо удалить довольно много разъемов, включая перчаточный ящик, подсветку пространства для ног, и нам также нужно вынуть мозг информационно-развлекательной системы, чтобы снять перчаточный ящик. Определенно не лучший дизайн для снятия и обслуживания электропроводки. В будущем я смогу перейти на мониторинг слепых зон и отслеживание полосы движения, используя ту же линию питания, но я не знаю, когда эти обновления могут воплотиться в жизнь.
Кодирование и тестирование
Для довольно многих установок на платформе MQB требуется то, что Volkswagen называет FeC (код активации функций) или коды обмена, поэтому включение функций больше не является простым делом, таким как отметка установки в шлюз и включение функций из задокументированных строк кода. Этот аспект также очень актуален, но сам Volkswagen India не знает о наличии FeC, и даже если бы они были, они не хотят добавлять себе головной боли, добавляя больше функций в автомобили клиентов. Я связался с @N2AutoTech (Nikhil), который выполнил для меня формальности онлайн-кодирования и активации за плату. Я также пытался связаться с Volkswagen и создал технический запрос о доступных кодах FeC, но не получил ответа в течение нескольких недель.
Этот аспект также очень актуален, но сам Volkswagen India не знает о наличии FeC, и даже если бы они были, они не хотят добавлять себе головной боли, добавляя больше функций в автомобили клиентов. Я связался с @N2AutoTech (Nikhil), который выполнил для меня формальности онлайн-кодирования и активации за плату. Я также пытался связаться с Volkswagen и создал технический запрос о доступных кодах FeC, но не получил ответа в течение нескольких недель.
Конечный результат
После завершения кодирования и активации компонентов настройки адаптивного круиз-контроля отображаются как в информационно-развлекательной системе Central 5F, так и в комбинации приборов. Я уверен, что настройки выглядели бы еще красивее на Tiguan AllSpace и T-Roc с их виртуальными кабинами. В моем автомобиле теперь есть адаптивный круиз-контроль со скоростью до 210 км/ч (что я не планирую тестировать в ближайшее время), а также Front Assist.
Как это работает
Использовать Adaptive Cruise довольно просто. Нажмите главный переключатель ввода-вывода, а затем нажмите значок автомобиля и расстояния в центре, и автомобиль начнет определять местонахождение автомобиля прямо на линии радара. Нажатие клавиш + и – помогает управлять фиксированным расстоянием между передней частью объекта. После того, как расстояние установлено, вы можете установить максимальную скорость.
Нажмите главный переключатель ввода-вывода, а затем нажмите значок автомобиля и расстояния в центре, и автомобиль начнет определять местонахождение автомобиля прямо на линии радара. Нажатие клавиш + и – помогает управлять фиксированным расстоянием между передней частью объекта. После того, как расстояние установлено, вы можете установить максимальную скорость.
Адаптивный круиз работает, чтобы получить максимально возможную скорость до установленной скорости в пределах установленного расстояния с передним объектом. Таким образом, он опирается на два параметра, а не только на скорость в круиз-контроле. И этот динамичный характер ACC делает его более удобной и приятной функцией в наших индийских условиях вождения. Если кто-то выезжает на нашу полосу движения, наш автомобиль замедляется и вместо этого начинает отслеживать этот автомобиль. Если происходит внезапное замедление транспортного средства, то теперь автомобиль может самостоятельно затормозить и полностью остановиться, и все это теоретически возможно до 210 км/ч, что просто безумие! Я пробовал адаптивный круиз-контроль на протяжении более 400 км, что включает в себя около 350 км езды по шоссе и 50 км езды по городу, и просто невероятно, насколько он хорош в автономном торможении и поддержании безопасной дистанции с транспортными средствами впереди.
Требуется некоторое время, чтобы осознать это, и я чувствую, что требуется еще больше времени, чтобы поверить в то, что Tiguan теперь может проехать Мумбаи-Пуну со скрещенными ногами на сиденье. Машина так блестяще разгоняется и тормозит. Ускорение восхитительно быстрое, а торможение определенно намного более расчетливое и мягкое. Ради тестирования я попробовал это на безопасных дорогах в городе, и он безупречно удерживал дистанцию от целевого автомобиля. Единственным недостатком, который я заметил, было то, что машина не может распознавать прерыватели скорости, если только впереди идущий автомобиль не ползет очень медленно, так как 30 км/ч, являющаяся минимальной установленной скоростью, слишком высока для большинства городских прерывателей скорости, если только вы не любите подпрыгивать. в твоей машине. Так что я нашел его пригодным для использования в городе в дорожных условиях, но он по праву настроен на экстремальную степень безопасности, что невозможно, учитывая, как мы действительно адаптируемся к нашим реальным сценариям вождения от бампера к бамперу и т. д. Более высокая итерация ACC может поддерживать Traffic Jam Assist, но в основном ему нужна камера на лобовом стекле, поэтому я жду, чтобы увидеть, насколько хорошо это получится, когда пользователи AllSpace получат все эти функции.
д. Более высокая итерация ACC может поддерживать Traffic Jam Assist, но в основном ему нужна камера на лобовом стекле, поэтому я жду, чтобы увидеть, насколько хорошо это получится, когда пользователи AllSpace получат все эти функции.
Front Assist
Front Assist выдает мне визуальное предупреждение, если я сильно превышаю скорость, а транспортное средство впереди меня намного медленнее, и отображается в виде восклицательного знака в качестве предварительного предупреждения. Если я продолжаю двигаться с той же скоростью, автомобиль сначала подает звуковой сигнал с символом тормоза, а если я пытаюсь врезаться в впереди идущее транспортное средство, Tiguan начинает тормозить сам! Это также работает, если транспортное средство внезапно выезжает на мою полосу, при условии, что оно делает это спереди, а не сбоку, поскольку в этом случае радар пропустил бы его. Front Assist имеет характеристики, которые можно изменить на информационно-развлекательном экране в системе помощи водителю.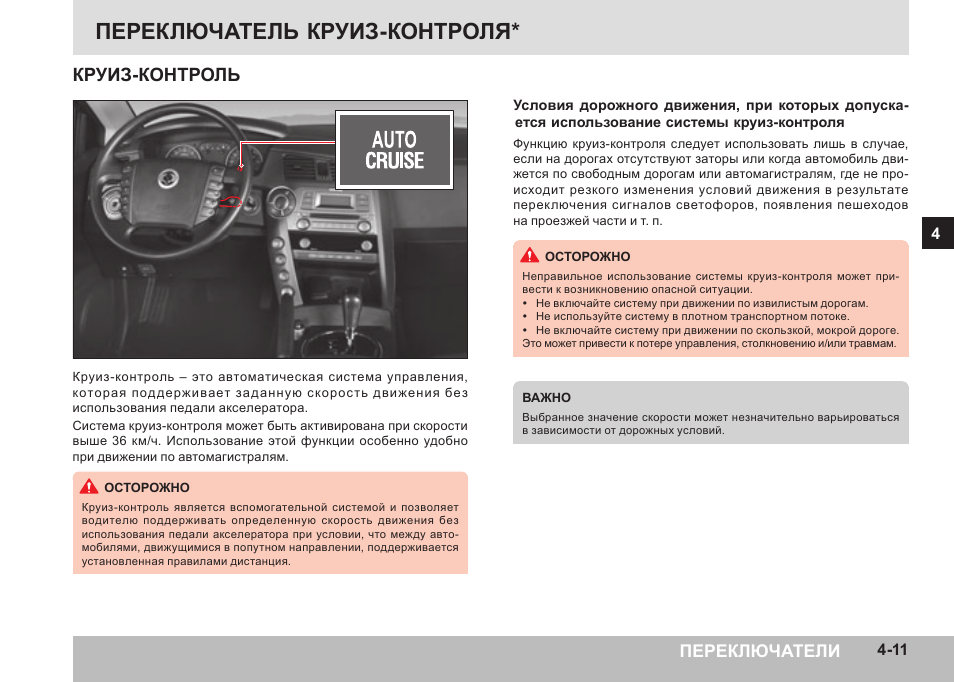 Мой отец вчера поехал в Лонавлу и сказал мне, что Wagon-R выехал на полосу и создал ситуацию внезапного торможения, с которой наша машина справилась сама, и поэтому я счастлив, что Front Assist, похоже, делает свое дело, улучшая управляемость. безопасность нашего Тигуана. Честно говоря, я пытался сам протестировать Front Assist и убедился, что он безопасно тормозит и справляется с ситуациями 7/10. В 3 из 10 раз у меня было ощущение, что машина не тормозит, и я сам нажимал на тормоза. Так что я должен сказать, что мы все еще должны быть начеку, несмотря на то, что в наших автомобилях работают такие передовые системы.
Мой отец вчера поехал в Лонавлу и сказал мне, что Wagon-R выехал на полосу и создал ситуацию внезапного торможения, с которой наша машина справилась сама, и поэтому я счастлив, что Front Assist, похоже, делает свое дело, улучшая управляемость. безопасность нашего Тигуана. Честно говоря, я пытался сам протестировать Front Assist и убедился, что он безопасно тормозит и справляется с ситуациями 7/10. В 3 из 10 раз у меня было ощущение, что машина не тормозит, и я сам нажимал на тормоза. Так что я должен сказать, что мы все еще должны быть начеку, несмотря на то, что в наших автомобилях работают такие передовые системы.
Мелочи
- Варианты ACC
- Существует довольно много вариантов ACC в зависимости от того, что предустановлено на вашем автомобиле, а автомобили с камерой Lane Assist также потенциально могут включать систему помощи при пробках (ACC для пробок). ), ACC Stop and Go и Predictive ACC (pACC), который также работает в сочетании с данными навигационной карты и системой удержания в полосе движения, чтобы управлять маршрутом самостоятельно. Поскольку дизельный Tiguan не поставлялся с навигацией, и у нас нет камеры на лобовом стекле, я не могу пока попытаться подтвердить это, но я могу с уверенностью сказать, что их специфичную для Индии полезность следует воспринимать с долей скептицизма, поскольку Volkswagen India все еще борется. с включением навигации на своих AllSpaces. Тем не менее, совершенно очевидно, что у платформы MQB светлое будущее, когда дело доходит до использования новейших и лучших функций.
- Калибровка датчика
- Всякий раз, когда Volkswagen попадает в лобовое столкновение или даже подвергается замене лобового стекла или даже выравниванию задней оси, руководство по ремонту предлагает повторную калибровку адаптивного радара и большинства автомобильных камер, и компании, безусловно, необходимо сделайте это при выпуске с завода, но в настоящее время нет возможности сделать это самостоятельно позже. Для калибровки камеры требуется коврик, который доступен у нескольких дилеров или экспертов по модернизации в Индии, но калибровка адаптивного круизного радара — это совсем другое дело, и для калибровки требуется установка лазера. У меня такое ощущение, что осталось всего несколько месяцев, прежде чем Volkswagen сделает эти инструменты доступными для своих крупных дилеров.
- Юридические последствия
- Честно говоря, я все еще читаю о юридических последствиях и лицензировании использования радара на этой машине. По словам нескольких экспертов, Volvo India приобрела лицензию на использование функций автономной безопасности на дороге, но есть большая вероятность, что Volkswagen все еще сомневается в этом. Я до сих пор удивляюсь, почему они приложили усилия, чтобы установить радар в Tiguan и T-Roc, но CBU — единственный звонок, который звенит в моей голове, когда я думаю об этом. Я надеюсь, что скоро найду некоторую ясность по этому поводу, и я надеюсь, что меня не остановят в районе армейского городка.
- Последствия гарантии
- Технически, это будет просто упражнение по включению функций на AllSpace и T-Roc и не должно препятствовать гарантии автомобиля. На дизельном Tiguan это, без сомнения, деятельность по модернизации, но, поскольку я не сращивал провода, у меня все должно быть в порядке, когда дело доходит до гарантии. В ODIS, официальном диагностическом инструменте Volkswagen, нет кодов неисправностей, и в автомобиле также нет видимых изменений. Рулевое управление выглядит так же, передний логотип тот же, и вы можете сказать, что что-то отличается, только когда вы подходите и прикасаетесь к нему, чего ни один руководитель Volkswagen не стал бы делать, а логотип настолько обманчив, что никто на самом деле не узнает, действительно ли что-то изменилось. Если я вообще что-то сделал, то только сделал этот автомобиль более безопасным для нас и окружающих, и у моих друзей есть подозрение, что это вполне может быть первый Tiguan в Махараштре с адаптивным круиз-контролем.
 Поскольку дизельный Tiguan не поставлялся с навигацией, и у нас нет камеры на лобовом стекле, я не могу пока попытаться подтвердить это, но я могу с уверенностью сказать, что их специфичную для Индии полезность следует воспринимать с долей скептицизма, поскольку Volkswagen India все еще борется. с включением навигации на своих AllSpaces. Тем не менее, совершенно очевидно, что у платформы MQB светлое будущее, когда дело доходит до использования новейших и лучших функций.
Поскольку дизельный Tiguan не поставлялся с навигацией, и у нас нет камеры на лобовом стекле, я не могу пока попытаться подтвердить это, но я могу с уверенностью сказать, что их специфичную для Индии полезность следует воспринимать с долей скептицизма, поскольку Volkswagen India все еще борется. с включением навигации на своих AllSpaces. Тем не менее, совершенно очевидно, что у платформы MQB светлое будущее, когда дело доходит до использования новейших и лучших функций. У меня такое ощущение, что осталось всего несколько месяцев, прежде чем Volkswagen сделает эти инструменты доступными для своих крупных дилеров.
У меня такое ощущение, что осталось всего несколько месяцев, прежде чем Volkswagen сделает эти инструменты доступными для своих крупных дилеров. В ODIS, официальном диагностическом инструменте Volkswagen, нет кодов неисправностей, и в автомобиле также нет видимых изменений. Рулевое управление выглядит так же, передний логотип тот же, и вы можете сказать, что что-то отличается, только когда вы подходите и прикасаетесь к нему, чего ни один руководитель Volkswagen не стал бы делать, а логотип настолько обманчив, что никто на самом деле не узнает, действительно ли что-то изменилось. Если я вообще что-то сделал, то только сделал этот автомобиль более безопасным для нас и окружающих, и у моих друзей есть подозрение, что это вполне может быть первый Tiguan в Махараштре с адаптивным круиз-контролем.
В ODIS, официальном диагностическом инструменте Volkswagen, нет кодов неисправностей, и в автомобиле также нет видимых изменений. Рулевое управление выглядит так же, передний логотип тот же, и вы можете сказать, что что-то отличается, только когда вы подходите и прикасаетесь к нему, чего ни один руководитель Volkswagen не стал бы делать, а логотип настолько обманчив, что никто на самом деле не узнает, действительно ли что-то изменилось. Если я вообще что-то сделал, то только сделал этот автомобиль более безопасным для нас и окружающих, и у моих друзей есть подозрение, что это вполне может быть первый Tiguan в Махараштре с адаптивным круиз-контролем.Что дальше
Я по-прежнему люблю держаться за руль и не думаю, что в ближайшее время буду переходить на Lane Keeping Assist. Тем не менее, я большой поклонник систем мониторинга слепых зон, и Tiguan совместим с двумя такими версиями. Один из них представляет собой индикатор в самом стекле зеркала, а другой — небольшой вырез в крышке зеркала. Если бы мне пришлось выбирать подход, я бы выбрал последний, поскольку зеркала подвержены окрашиванию и повреждениям, а колпачок для зеркала может просто прослужить дольше. Для этой задачи потребуются два новых датчика ближнего действия в заднем бампере, и это, безусловно, должно быть забавным, полезным и еще одним большим плюсом для безопасности того, что уже является удобным безопасным внедорожником!
Если бы мне пришлось выбирать подход, я бы выбрал последний, поскольку зеркала подвержены окрашиванию и повреждениям, а колпачок для зеркала может просто прослужить дольше. Для этой задачи потребуются два новых датчика ближнего действия в заднем бампере, и это, безусловно, должно быть забавным, полезным и еще одним большим плюсом для безопасности того, что уже является удобным безопасным внедорожником!
Быстрый прощальный снимок перед тем, как я вернусь с очередной рецензией на еще одно большое обновление!
Вот короткое видео об адаптивном круиз-контроле в Tiguan!
Еще раз спасибо Fluidicjoy. Ознакомьтесь с комментариями BHPian для получения дополнительной информации и информации.
Обсуждение форума
- Метки:
- Индийский
- Фольксваген
- Другое
- Тигуан
- круиз-контроль
Вернуться к оглавлению Следующая статья
Сохранение полосы движения своими руками. Создание системы удержания полосы движения с глубоким… | Альберто Г.
 Ривера
РивераГрандиозный вызов DARPA 2005 года рассматривается многими как начало нынешней волны технологий беспилотных автомобилей. Перед командами стоит задача построить автономное транспортное средство, способное преодолеть 132-мильную трассу по бездорожью между границей Невады и Калифорнии, используя лишь редкие путевые точки. Пять команд завершили гонку, и команда Stanford Race Team на своем автомобиле Stanley заняла первое место.
Стэнли и я в Смитсоновском национальном музее авиации и космонавтикиЯ считаю грандиозный вызов DARPA 2005 года отправной точкой для современных технологий беспилотных автомобилей. В то время как системы предупреждения о выезде с полосы движения существуют с 2001 года, только сейчас, в конце 2019 года, мы начинаем видеть первые проблески сервисов беспилотных автомобилей, запускаемых для публики, с услугой автономного вызова Waymo.
https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety Общество автомобильных инженеров (SAE) разработало список уровней автоматизации, чтобы помочь нам сравнить различные системы беспилотного вождения, начиная от систем без автоматизации (уровень 0) до полной автоматизации без участия человека в цикле (уровень 5). Уровень автоматизации Waymo можно охарактеризовать как уровень 4, что означает, что автомобиль полностью автономен в геозоне.
Уровень автоматизации Waymo можно охарактеризовать как уровень 4, что означает, что автомобиль полностью автономен в геозоне.
Система автопилота Tesla относится к уровню 3, поскольку по-прежнему требуется контроль со стороны человека, и система отключится и предложит водителю взять управление на себя, если дорожные условия не подходят для самостоятельного вождения. В продаже есть несколько других систем уровня 3, таких как Super Cruise от Cadilac, но большинство производителей автомобилей предлагают только системы уровня 2. Автоматизация уровня 2 очень похожа на уровень 3. Tesla и Cadillac говорят, что их системы Autopilot и Super Cruise на самом деле относятся к высокому уровню 2, поскольку они требуют от водителя постоянного контроля систем. На мой взгляд, система уровня 2 немного уступает системе, подобной автопилоту, а автопилот и суперкруиз описываются как таковые, чтобы избежать ответственности. Большинство ADAS (усовершенствованных систем помощи водителю) относятся к Уровню 2. Это такие системы, как усовершенствованный круиз-контроль или системы удержания в полосе движения — обычные функции на новых моделях автомобилей. Системы уровня 1 существуют гораздо дольше, наиболее распространенной из которых является неадаптивный круиз-контроль. Я бы также включил в эту категорию системы предупреждения о выходе из полосы движения.
Это такие системы, как усовершенствованный круиз-контроль или системы удержания в полосе движения — обычные функции на новых моделях автомобилей. Системы уровня 1 существуют гораздо дольше, наиболее распространенной из которых является неадаптивный круиз-контроль. Я бы также включил в эту категорию системы предупреждения о выходе из полосы движения.
Мой нынешний ежедневный водитель — седан 2003 года выпуска. Он оснащен неадаптивной системой круиз-контроля, распространенной с 1970-х годов. В качестве побочного проекта я хотел посмотреть, смогу ли я использовать новейшие технологии, чтобы обновить свою машину с устаревшего уровня 1 до чуть менее устаревшего уровня 2, создав и модернизировав систему удержания полосы движения. Целью этого проекта является не создание полностью автономного автомобиля, такого как Waymo или Cruise, или даже системы автопилота, подобной той, что используется в Tesla, а, скорее, системы удержания полосы движения, подобной той, которая предлагается производителями автомобилей с 2014 года.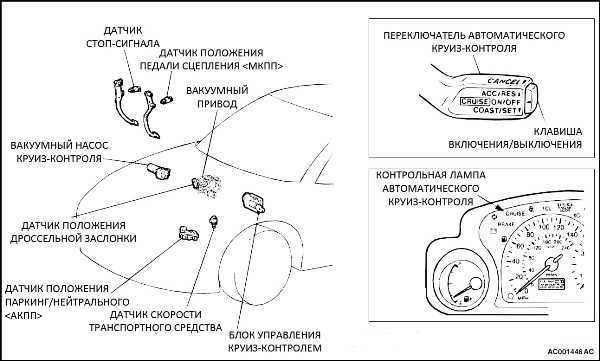 Эти системы работают. почти в оптимальных условиях, когда разметка полосы движения видна и легко идентифицируема.
Эти системы работают. почти в оптимальных условиях, когда разметка полосы движения видна и легко идентифицируема.
Приближение
Чтобы это можно было считать успешным, системы должны быть в состоянии управлять и удерживать автомобиль в середине полосы на хорошо обозначенной дороге. В системах, которые я создаю, есть 3 основных компонента. Во-первых, необходимо определить полосу движения. Во-вторых, необходимо определить, насколько далеко от центра полосы находится автомобиль. Наконец, ему нужна система управления, которая удерживает автомобиль в центре полосы движения.
Идентификация полос
Единственный датчик, используемый в этом проекте, — это веб-камера, установленная на лобовом стекле автомобиля и обеспечивающая видеовход для остальной части системы. При создании и тестировании системы я работал с предварительно записанным видео, полученным от Udacity Self Driving Car Nanodegree. Хотя у программы Udacity есть проект с очень похожей целью, подход, используемый в этом проекте, сильно отличается. Программа Udacity действительно послужила источником вдохновения и базовой метрикой для этого проекта. Udacity также предоставляет 3 видеоролика с видеорегистратором с возрастающей сложностью. В проекте Udacity от учащихся ожидается хорошая успеваемость только в самом легком из трех видео. Мое решение для проекта Udacity с использованием методов, которым меня научили в ходе курса, оказалось недостаточно надежным, чтобы справиться с менее оптимальными условиями в последних двух видео. Поскольку конечной целью этого проекта является развертывание системы на реальном автомобиле, я решил поискать другой подход, который лучше подходит для различных дорожных условий.
Программа Udacity действительно послужила источником вдохновения и базовой метрикой для этого проекта. Udacity также предоставляет 3 видеоролика с видеорегистратором с возрастающей сложностью. В проекте Udacity от учащихся ожидается хорошая успеваемость только в самом легком из трех видео. Мое решение для проекта Udacity с использованием методов, которым меня научили в ходе курса, оказалось недостаточно надежным, чтобы справиться с менее оптимальными условиями в последних двух видео. Поскольку конечной целью этого проекта является развертывание системы на реальном автомобиле, я решил поискать другой подход, который лучше подходит для различных дорожных условий.
Возрастающая сложность слева направо.
Существует множество способов определения линий дорожек с использованием традиционных алгоритмов компьютерного зрения, таких как обнаружение краев, но я обнаружил, что мои решения, использующие этот подход, не очень обобщаемы и хорошо работают только в оптимальных условиях.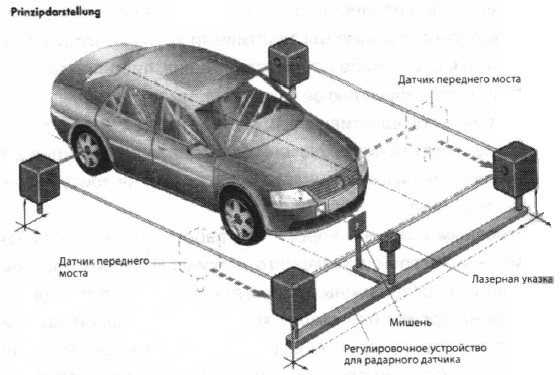 В поисках лучшего подхода я наткнулся на статью, в которой описывается нейронная сеть, способная обнаруживать линии дорожек под названием Lanenet. Не волнуйтесь, если вы плохо разбираетесь в нейронных сетях. Я лишь кратко коснусь их в этой статье, и вам не нужно понимать их внутреннюю работу, чтобы повторно реализовать этот проект. По сути, эта нейронная сеть действует как экстрактор признаков, который выделяет разметку полосы движения и игнорирует все остальное на изображении. Lanenet — это глубокая нейронная сеть, использующая архитектуру кодер-декодер, похожую на Enet, но модифицированную таким образом, чтобы иметь две ветви. Одна ветвь выполняет семантическую сегментацию, которая дает метку каждому пикселю исходного изображения, назначая его полосе. Вторая ветвь также помечает каждый пиксель исходного изображения, но только в двоичном виде, что означает, что метка 0 — это пиксель, не соответствующий полосе, а метка 1 — это пиксель, который принадлежит полосе. Комбинируя два выхода нейронной сети, мы можем обнаружить каждую отдельную дорожку, присутствующую на изображении.
В поисках лучшего подхода я наткнулся на статью, в которой описывается нейронная сеть, способная обнаруживать линии дорожек под названием Lanenet. Не волнуйтесь, если вы плохо разбираетесь в нейронных сетях. Я лишь кратко коснусь их в этой статье, и вам не нужно понимать их внутреннюю работу, чтобы повторно реализовать этот проект. По сути, эта нейронная сеть действует как экстрактор признаков, который выделяет разметку полосы движения и игнорирует все остальное на изображении. Lanenet — это глубокая нейронная сеть, использующая архитектуру кодер-декодер, похожую на Enet, но модифицированную таким образом, чтобы иметь две ветви. Одна ветвь выполняет семантическую сегментацию, которая дает метку каждому пикселю исходного изображения, назначая его полосе. Вторая ветвь также помечает каждый пиксель исходного изображения, но только в двоичном виде, что означает, что метка 0 — это пиксель, не соответствующий полосе, а метка 1 — это пиксель, который принадлежит полосе. Комбинируя два выхода нейронной сети, мы можем обнаружить каждую отдельную дорожку, присутствующую на изображении.
Модель Lanenet, описанная в документе, реализована, обучена и доступна в этом репозитории пользователем Github MaybeShewill-CV. Остальная часть системы построена вокруг модифицированной версии этой модели. Хотя репозиторий предоставляет комплексное решение, как это описано в документе, я обнаружил, что постобработка модели не очень надежна, поэтому я реализовал свою собственную версию.
Постобработка состоит из двух выходных данных модели и их объединения для получения изображения, в котором каждая дорожка окрашена по-разному. Из комбинированного изображения мы можем использовать цветовой порог, чтобы видеть только пиксели определенного цвета, поэтому мы можем визуализировать только одну полосу за раз. Для этого проекта важны только непосредственная маркировка левой и правой полос, поэтому пороговые значения цвета применяются, чтобы сделать видимыми только эти две полосы. Взяв каждую из соответствующих дорожек, мы можем применить преобразование изображения сверху вниз, чтобы лучше визуализировать дорожки как кривые на декартовой плоскости.
Взяв каждую из соответствующих дорожек, мы можем применить преобразование изображения сверху вниз, чтобы лучше визуализировать дорожки как кривые на декартовой плоскости.
На данный момент у нас есть только каждый пиксель, представленный в виде точки на плоскости, поэтому нам нужно найти полиномиальную кривую, которая лучше всего проходит через эти точки. Для этого мы используем алгоритм подбора полиномов наименьших квадратов. Поскольку наши данные все еще представляют собой некоторый шум, мы фактически запускаем этот алгоритм дважды. В первый раз у нас есть только линейная подгонка и вычисление расстояния от каждой точки до вновь созданной линии. Во второй раз мы вычисляем полиномиальную подгонку 2-го порядка, игнорируя все точки, которые находятся слишком далеко от нашей первой линии. Это убирает шум с нашей разметки и делает наше обнаружение полосы движения намного более надежным. На данный момент у нас есть линия, которая описывает каждую из наших линий дорожек.
Расчет расстояния от центра
С помощью двух кривых, описывающих линии нашей полосы движения, мы можем вычислить центр полосы движения, предполагая, что это середина между двумя линиями. Мы также предполагаем, что центр изображения совпадает с центром автомобиля. Зная расположение центра автомобиля и центра полосы, мы можем рассчитать отклонение от центра полосы. Это отклонение будет использоваться как ошибка, которую мы пытаемся минимизировать. Исходный расчет для этого расстояния использует координаты пикселей в качестве наших точек. В США разметка полос движения на шоссе находится на расстоянии 3,7 метра друг от друга. Используя эту информацию, мы можем преобразовать наше измерение расстояния из пикселей в метры. Это расстояние от центра в метрах будет вводом для нашего контроллера, который будет управлять автомобилем и удерживать его в центре полосы движения.
Рулевое управление
Теперь, когда у нас есть ошибка в метрах, мы хотим взять эту информацию и получить соответствующий угол поворота рулевого колеса. Для этого воспользуемся ПИД-регулятором. ПИД-регуляторы — один из самых популярных методов управления, используемый во всем, от термостатов до кораблей, самолетов и ракет. По сути, ПИД-регулятор представляет собой контур обратной связи, который принимает значение ошибки и пытается исправить его, применяя какое-либо действие к более крупной системе и повторно оценивая ошибку после того, как это действие было выполнено.
Диаграмма ПИД-регулятора https://en.wikipedia.org/wiki/PID_controller ПИД означает пропорциональную интегральную производную, описывающую каждый компонент контроллера. Пропорциональные компоненты действуют как усилитель, принимая наше расстояние ошибки и умножая его. суммирование предыдущих ошибок. Это помогает, когда система постоянно имеет небольшое количество ошибок. Накопление с течением времени небольшой ошибки будет затем усиливаться интегральной составляющей как гораздо большая ошибка, а затем корректироваться контроллером. Производная — это скорость изменения между последней ошибкой и текущей ошибкой. Этот термин помогает не выйти за пределы цели контроллера, а затем получить ошибку в противоположном направлении. Выход каждого компонента суммируется, чтобы вывести соответствующую переменную процесса, которая в нашем случае представляет собой угол поворота рулевого колеса.
Накопление с течением времени небольшой ошибки будет затем усиливаться интегральной составляющей как гораздо большая ошибка, а затем корректироваться контроллером. Производная — это скорость изменения между последней ошибкой и текущей ошибкой. Этот термин помогает не выйти за пределы цели контроллера, а затем получить ошибку в противоположном направлении. Выход каждого компонента суммируется, чтобы вывести соответствующую переменную процесса, которая в нашем случае представляет собой угол поворота рулевого колеса.
Начальное тестирование
После того, как обнаружение полосы движения и управление рулевым управлением завершены, мы готовы начать тестирование некоторого оборудования! Первый раунд тестирования — это соединение всех компонентов вместе и управление макетом рулевого колеса. В основном это проверка работоспособности, чтобы убедиться, что система в некоторой степени безопасна. Алгоритм обнаружения полосы движения запускается на настольном ПК с графической картой NVIDIA 1080, работающей со скоростью около 12 кадров в секунду. Управление осуществляется путем подключения Raspberry Pi с драйвером двигателя к шаговому двигателю, немного более мощному, чем те, что используются в 3D-принтерах.
Управление осуществляется путем подключения Raspberry Pi с драйвером двигателя к шаговому двигателю, немного более мощному, чем те, что используются в 3D-принтерах.
Я протестировал систему на 3 видео из Udacity и остался доволен общей производительностью. Система отлично работает на двух видео с шоссе и способна точно вычислять центр полосы движения в каждом кадре. Третье видео намного сложнее, так как оно идет по извилистой дороге с частичной разметкой с правой стороны и большим количеством бликов на лобовом стекле. Я написал программу так, чтобы я мог двигаться по одной полосе, если она не видит обе, и ехать прямо, если она не видит ни того, ни другого. Это действительно далеко от оптимальных условий и далеко за рамками данного проекта. При развертывании на реальном транспортном средстве система должна отключиться и предложить водителю взять управление на себя. Однако система способна идентифицировать полосы и рулевое управление, подходящие для большей части видео. Есть один сценарий, который может привести к катастрофическому отказу, когда автомобиль делает резкий поворот, с которым система не может справиться.
В целом, я очень доволен производительностью системы как системы уровня 2, работающей в ограниченных условиях окружающей среды.
Проверка рулевого управленияБудущие усовершенствования и дальнейшие действия
В систему можно внести множество усовершенствований. Самая большая область для улучшения — скорость обработки 12 кадров в секунду. Здесь у нас есть много вариантов, включая квантование нейронной сети или работу на более качественном оборудовании. Одним из наиболее трудоемких компонентов является запуск алгоритма подбора кривой дважды для каждой дорожки, который можно сократить, если мы найдем способ уменьшить шум в выходных данных нейронной сети. Другие ускорения могут включать в себя написание программы на языках более низкого уровня, таких как C, или использование CUDA вместо Python.
Другая идея состоит в том, чтобы нейронная сеть предсказывала центр полосы движения напрямую, а не определяла линии дорожек, но это потребовало бы очень значительных изменений в проекте и другой архитектуры нейронной сети и обучающего набора данных.
Аппаратную часть также можно улучшить. Изначально планировалось установить шаговый двигатель на приборной панели и прикрепить ремень к рулю. Я протестировал этот подход и обнаружил, что передаточное число между шестерней на конце мотора и рулевым колесом слишком велико, чтобы рулевое колесо могло двигаться быстро. Этого может быть достаточно для некоторых легких маневров по удержанию полосы движения, но машина не будет резко поворачивать в ближайшее время.
Следующим шагом будет дальнейшее тестирование с большим количеством видео с видеорегистратора, а затем тестирование с реальным автомобилем, в идеале не на дорогах общего пользования. Я планирую отредактировать этот пост и написать еще один, как только проект будет завершен. Я также планирую позже выпустить видео с подробным описанием моего опыта и сделать код общедоступным.
На данный момент вы можете увидеть результаты запуска программы на каждом из
Project Video: https://youtu.be/kuY4kcaewBs
Challenge Video: https://youtu.