Шереметьево схема парковки d — Bitbucket
Created by feugeteacloo1983
snippet.markdown
———————————————————
>>> СКАЧАТЬ ФАЙЛ <<<
———————————————————
Проверено, вирусов нет!
———————————————————
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Вся схема. Маршрут до выхода на посадку.Показать на карте Остановки Парковки. Терминал F Терминал E Терминал D Терминал « Шереметьево-Карго» Терминал и ж/д станция «Аэроэкспресс» Терминал B (идет строительство) Зал прилета, 1 этаж Зал вылета, 3 этаж. Стоянка в Шереметьево у Терминала D.
 Только еще раз повторюсь: не паркуйся у терминала, езжай в крытую стоянку. Оглавление: Аэропорт Шереметьево схема расположения терминалов. Южный терминальный комплекс.Парковка и схема проезда до терминалов в Шереметьево. Заключение. Крупнейшая парковка в Шереметьево. 5000 мест.После того, как Вы оплатили парковку на сайте Вы получаете письмо с данной инструкцией. Главная » Аэропорты России » Шереметьево (Sheremetyevo Airport).Общая схема парковок. Р1. «Park and Fly». Парковка. Схема парковок аэропорта Шереметьево схожа с расположением терминалов, так как стоянки для автомобилей находятся в непосредственной близости от зданий как южных, так и северных секторов аэропорта. Интерактивная схема парковки. Тарифы, онлайн-расчет стоимости и способы оплаты парковочного места. Ответы на популярные вопросы. Фотогалерея. Бизнес-парке SkyPoint предлагает услуги платной парковки рядом с аэропортом Шереметьево.Пожалуйста, ознакомьтесь со схемами остановок в терминалах: Терминал F, Терминал E, Терминал D.
Только еще раз повторюсь: не паркуйся у терминала, езжай в крытую стоянку. Оглавление: Аэропорт Шереметьево схема расположения терминалов. Южный терминальный комплекс.Парковка и схема проезда до терминалов в Шереметьево. Заключение. Крупнейшая парковка в Шереметьево. 5000 мест.После того, как Вы оплатили парковку на сайте Вы получаете письмо с данной инструкцией. Главная » Аэропорты России » Шереметьево (Sheremetyevo Airport).Общая схема парковок. Р1. «Park and Fly». Парковка. Схема парковок аэропорта Шереметьево схожа с расположением терминалов, так как стоянки для автомобилей находятся в непосредственной близости от зданий как южных, так и северных секторов аэропорта. Интерактивная схема парковки. Тарифы, онлайн-расчет стоимости и способы оплаты парковочного места. Ответы на популярные вопросы. Фотогалерея. Бизнес-парке SkyPoint предлагает услуги платной парковки рядом с аэропортом Шереметьево.Пожалуйста, ознакомьтесь со схемами остановок в терминалах: Терминал F, Терминал E, Терминал D.
 deleted]]
deleted]][[/deleted]]
- Метро
- МЦК
- На машине
- Паркинг
- Разгрузка товара
Удобный способ добраться до «АФИМОЛЛ Сити» — на метро, минуя пробки! Выходы со станций метро «Выставочная» и «Деловой центр» организованы непосредственно внутрь комплекса.

- От метро “Выставочная”
- От метро “Международная”
Комфортно добраться до «АФИМОЛЛ Сити» вы можете на личном автотранспорте. Выбирайте для себя наиболее удобный маршрут и приезжайте к нам в выходные и будние дни.
Построить маршрут- Из центра
- С севера Шмитовского проезда
- С севера ТТК
- С юга ТТК
- Построить маршрут
Собственная
подземная парковка
Карта парковки
- Звездам (по убыванию)
- Звезды (снизу вверх)
- Ближайший к центру города
- [[#convert_markup]]
This comment is currently being rendered in creole. Editing the comment will cause it to be rendered in markdown.
[[/convert_markup]]Cancel
This comment is currently being rendered in creole. Editing the comment will cause it to be rendered in markdown.
Как добраться
Как добраться Прокрутка
фото
Схема ТРЦ
Как добраться
10:00 – 22:00
Программа
лояльности
Подарочная
карта

Выбор сервиса
Яндекс навигатор
Яндекс карты
Девелопер
с мировым именем
AFI Development — международная многопрофильная девелоперская компания полного цикла с 20-летним опытом работы на российском рынке.
Системообразующее предприятие строительной отрасли России.
Диверсифицированный портфель AFI Development включает:
— более 1,2 млн кв. м реализованных объектов
— более 1,5 млн кв. м объектов в стадии реализации
AFI Development — международная многопрофильная девелоперская компания полного цикла с 20-летним опытом работы на российском рынке.
Системообразующее предприятие строительной отрасли России.
Диверсифицированный портфель AFI Development включает:
— более 1,2 млн кв. м реализованных объектов
— более 1,5 млн кв. м объектов в стадии реализации
AFI Development — международная многопрофильная девелоперская компания полного цикла с 20-летним опытом работы на российском рынке.
Системообразующее предприятие строительной отрасли России.
Диверсифицированный портфель AFI Development включает:
— более 1,2 млн кв.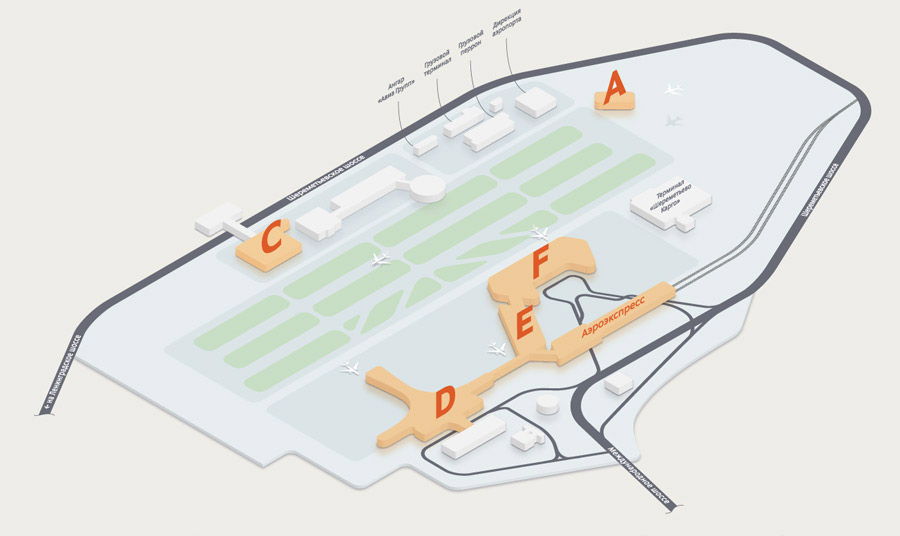 м реализованных объектов
м реализованных объектов
— более 1,5 млн кв. м объектов в стадии реализации
AFI Development — международная многопрофильная девелоперская компания полного цикла с 20-летним опытом работы на российском рынке.
Системообразующее предприятие строительной отрасли России.
Диверсифицированный портфель AFI Development включает:
— более 1,2 млн кв. м реализованных объектов
Жилая недвижимость бизнес
и комфорт класса в Москве и области
ДЛЯ ЖИЗНИ
Офисные помещения
А+ класса в центре Москвы
Для бизнеса
Отели и санатории
в нескольких регионах России
Для отдыха
Более 450 магазинов и кафе
в центре Москва-Сити
Для Досуга
Сообщение отправлено
Спасибо, ваше сообщение отправлено. В ближайшее время с вами свяжутся наши менеджеры для уточнения всех деталей
Закрыть
Сообщение отправляется
Спасибо, ваше сообщение отправляется, подождите немного.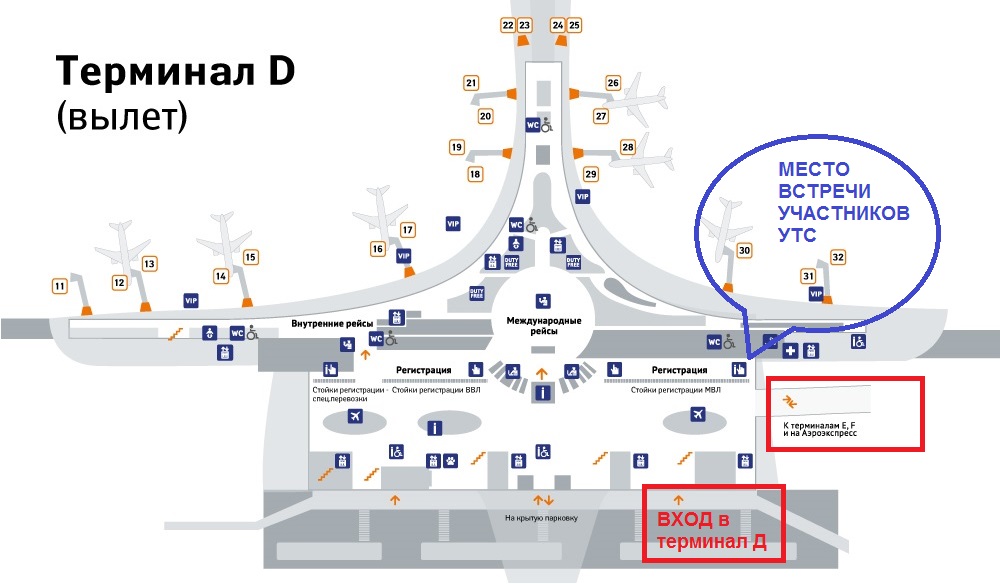
Закрыть
Что такое SLAM (одновременная локализация и сопоставление) — MATLAB и Simulink
Процесс обработки SLAM
Чтобы узнать больше о компоненте внешней обработки, давайте рассмотрим визуальный SLAM и лидарный SLAM — два разных метода SLAM.
Visual SLAM
Как следует из названия, визуальный SLAM (или vSLAM) использует изображения, полученные с камер и других датчиков изображения. Visual SLAM может использовать простые камеры (широкоугольные, «рыбий глаз» и сферические камеры), камеры с составным глазом (стереокамеры и мультикамеры) и камеры RGB-D (камеры глубины и ToF).
Visual SLAM может быть реализован с небольшими затратами при использовании относительно недорогих камер. Кроме того, поскольку камеры предоставляют большой объем информации, их можно использовать для обнаружения ориентиров (ранее измеренных положений). Обнаружение ориентиров также можно сочетать с оптимизацией на основе графа, что обеспечивает гибкость реализации SLAM.
Монокулярный SLAM — это когда vSLAM использует одну камеру в качестве единственного датчика, что затрудняет определение глубины. Эту проблему можно решить либо путем обнаружения маркеров дополненной реальности, шахматных досок или других известных объектов на изображении для локализации, либо путем объединения информации с камеры с другим датчиком, таким как инерциальные измерительные блоки (IMU), которые могут измерять физические величины, такие как скорость и ориентация. Технология, связанная с vSLAM, включает в себя структуру из движения (SfM), визуальную одометрию и настройку пучка.
Алгоритмы Visual SLAM можно разделить на две категории. Разреженные методы сопоставляют характерные точки изображений и используют такие алгоритмы, как PTAM и ORB-SLAM. Плотные методы используют общую яркость изображений и используют такие алгоритмы, как DTAM, LSD-SLAM, DSO и SVO.
Структура от движения.
Регистрация облака точек для RGB-D SLAM
LiDAR SLAM
Обнаружение света и определение дальности (лидар) — это метод, в котором в основном используется лазерный датчик (или датчик расстояния).
По сравнению с камерами, датчиками ToF и другими датчиками лазеры значительно более точны и используются для приложений с высокоскоростными транспортными средствами, такими как беспилотные автомобили и дроны. Выходные значения лазерных датчиков обычно представляют собой данные облака точек в 2D (x, y) или 3D (x, y, z). Облако точек лазерного датчика обеспечивает высокоточные измерения расстояний и очень эффективно работает для построения карты с помощью SLAM. Как правило, движение оценивается последовательно путем сопоставления облаков точек. Расчетное перемещение (пройденное расстояние) используется для локализации транспортного средства. Для сопоставления лидарного облака точек используются алгоритмы регистрации, такие как итерационная ближайшая точка (ICP) и алгоритмы преобразования нормального распределения (NDT). 2D- или 3D-карты облаков точек могут быть представлены в виде карты сетки или карты вокселей.
С другой стороны, облака точек не так точно детализированы, как изображения с точки зрения плотности, и не всегда обеспечивают достаточные признаки для сопоставления. Например, в местах с небольшим количеством препятствий сложно выровнять облака точек, и это может привести к потере местоположения автомобиля. Кроме того, сопоставление облаков точек обычно требует высокой вычислительной мощности, поэтому необходимо оптимизировать процессы для повышения скорости. Из-за этих проблем локализация для автономных транспортных средств может включать объединение других результатов измерений, таких как одометрия колес, глобальная навигационная спутниковая система (GNSS) и данные IMU. Для таких приложений, как складские роботы, обычно используется 2D-лидар SLAM , тогда как SLAM с использованием трехмерных лидарных облаков точек можно использовать для БПЛА и автоматизированного вождения.
Например, в местах с небольшим количеством препятствий сложно выровнять облака точек, и это может привести к потере местоположения автомобиля. Кроме того, сопоставление облаков точек обычно требует высокой вычислительной мощности, поэтому необходимо оптимизировать процессы для повышения скорости. Из-за этих проблем локализация для автономных транспортных средств может включать объединение других результатов измерений, таких как одометрия колес, глобальная навигационная спутниковая система (GNSS) и данные IMU. Для таких приложений, как складские роботы, обычно используется 2D-лидар SLAM , тогда как SLAM с использованием трехмерных лидарных облаков точек можно использовать для БПЛА и автоматизированного вождения.
SLAM с 2D-лидаром
SLAM с 3D-лидаром
Общие проблемы с SLAM
Хотя SLAM используется для некоторых практических приложений, несколько технических проблем препятствуют более широкому внедрению. У каждого есть контрмера, которая может помочь преодолеть препятствие.
1. Ошибки локализации накапливаются, вызывая существенное отклонение от фактических значений
SLAM оценивает последовательное движение, которое включает некоторую погрешность. Ошибка накапливается с течением времени, вызывая существенное отклонение от фактических значений. Это также может привести к разрушению или искажению картографических данных, что затруднит последующий поиск. Возьмем пример проезда по квадратному проезду. По мере накопления ошибки начальная и конечная точка робота больше не совпадают. Это называется проблемой замыкания цикла. Такие ошибки оценки позы неизбежны. Важно обнаруживать замыкания цикла и определять, как исправить или отменить накопленную ошибку.
Пример построения графа поз и минимизации ошибок.
Одной из контрмер является запоминание некоторых характеристик ранее посещенного места в качестве ориентира и минимизация ошибки локализации. Графики позы построены, чтобы помочь исправить ошибки. Решив минимизацию ошибок как задачу оптимизации, можно получить более точные картографические данные. Этот вид оптимизации называется настройкой пакета в визуальном SLAM.
Этот вид оптимизации называется настройкой пакета в визуальном SLAM.
Пример построения графа поз и минимизации ошибок
2. Ошибка локализации и потеря положения на карте
Картирование изображения и облака точек не учитывает характеристики движения робота. В некоторых случаях этот подход может генерировать дискретные оценки положения. Например, результат расчета, показывающий, что робот, движущийся со скоростью 1 м/с, внезапно прыгнул вперед на 10 метров. Этот тип сбоя локализации можно предотвратить либо с помощью алгоритма восстановления, либо путем объединения модели движения с несколькими датчиками для выполнения расчетов на основе данных датчика.
Существует несколько методов использования модели движения с объединением датчиков. Обычный метод — использование фильтрации Калмана для локализации. Поскольку большинство роботов с дифференциальным приводом и четырехколесных транспортных средств обычно используют нелинейные модели движения, часто используются расширенные фильтры Калмана и фильтры частиц (локализация Монте-Карло). В некоторых случаях также можно использовать более гибкие фильтры Байеса, такие как неароматизированные фильтры Калмана. Некоторыми широко используемыми датчиками являются инерциальные измерительные устройства, такие как IMU, система отсчета ориентации и курса или AHRS, инерциальная навигационная система или INS, датчики акселерометра, гироскопические датчики и магнитные датчики). Колесные энкодеры, прикрепленные к транспортному средству, часто используются для одометрии.
В некоторых случаях также можно использовать более гибкие фильтры Байеса, такие как неароматизированные фильтры Калмана. Некоторыми широко используемыми датчиками являются инерциальные измерительные устройства, такие как IMU, система отсчета ориентации и курса или AHRS, инерциальная навигационная система или INS, датчики акселерометра, гироскопические датчики и магнитные датчики). Колесные энкодеры, прикрепленные к транспортному средству, часто используются для одометрии.
Когда локализация не удалась, контрмерой для восстановления является запоминание ориентира в качестве ключевого кадра из ранее посещенного места. При поиске ориентира применяется процесс извлечения признаков таким образом, что он может сканировать с высокой скоростью. Некоторые методы, основанные на функциях изображения, включают набор функций (BoF) и набор визуальных слов (BoVW). В последнее время глубокое обучение используется для сравнения расстояний от признаков.
3. Высокие вычислительные затраты на обработку изображений, обработку облака точек и оптимизацию
Стоимость вычислений является проблемой при реализации SLAM на оборудовании автомобиля. Вычисления обычно выполняются на компактных встроенных микропроцессорах с низким энергопотреблением, которые имеют ограниченную вычислительную мощность. Для достижения точной локализации важно выполнять обработку изображений и сопоставление облаков точек с высокой частотой. Кроме того, оптимизационные расчеты, такие как закрытие цикла, требуют больших вычислительных ресурсов. Проблема состоит в том, как выполнить такую вычислительно затратную обработку на встроенных микрокомпьютерах.
Вычисления обычно выполняются на компактных встроенных микропроцессорах с низким энергопотреблением, которые имеют ограниченную вычислительную мощность. Для достижения точной локализации важно выполнять обработку изображений и сопоставление облаков точек с высокой частотой. Кроме того, оптимизационные расчеты, такие как закрытие цикла, требуют больших вычислительных ресурсов. Проблема состоит в том, как выполнить такую вычислительно затратную обработку на встроенных микрокомпьютерах.
Одной из контрмер является параллельное выполнение различных процессов. Такие процессы, как извлечение признаков, которое является предварительной обработкой процесса сопоставления, относительно подходят для распараллеливания. Использование многоядерных процессоров для обработки, вычисления одной инструкции и нескольких данных (SIMD) и встроенных графических процессоров может в некоторых случаях еще больше повысить скорость. Кроме того, поскольку оптимизация графа поз может выполняться в течение относительно длительного цикла, снижение ее приоритета и выполнение этого процесса через равные промежутки времени также может повысить производительность.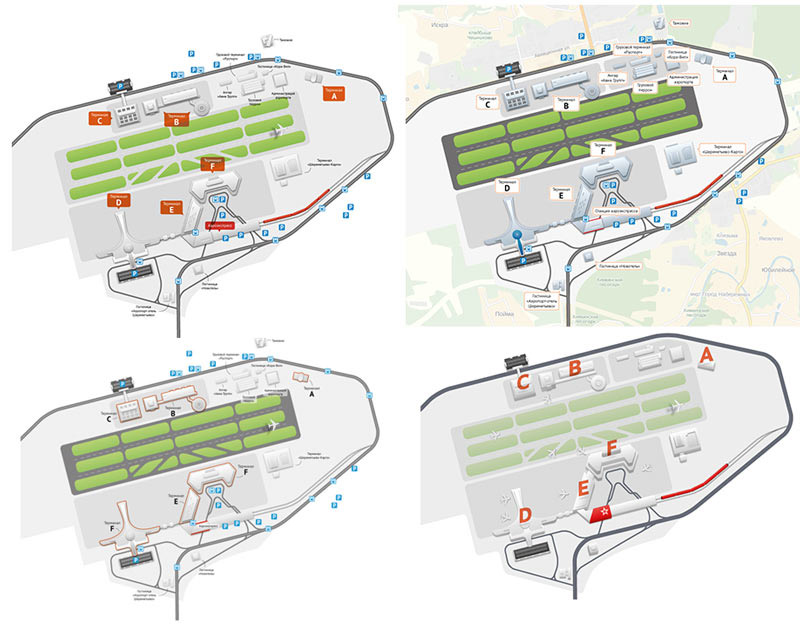
Отели на карте
Сортировать по
Найдено 34 объекта. Показано 1–30
Новотель Москва Аэропорт Шереметьево, Химки
141400, Шереметьево 2, корп. 3Владение 3
6,88 км от центра Показать на карте
Спросить
Подробнее
Отель Radisson Blu, Москва Аэропорт Шереметьево, Химки
Mezhdunarodnoe Shosse, 1A, Moscow 141400
6,95 км от центра Center Show на карте
Inquire
Читать дальше
Aviator Sheremetyevo, Khimki
141400, Sheremetievo Dairty, Ermnal D, E, E, F
141400, Sheremetievo, Ermanly Do, E, F
141400, Sheremetievo, Erminalevo, E, F
141400, Sheremetievo. Показать на карте
Спросить
Подробнее
Concept, Химки
Московская область, г. Химки, ул.0003
Country Park Hotel, Khimki
Ulitsa Panfilova, 21/1
2,42 км от центра Center Show на карте
Inquire
Читать More
Dream Hills Club, Khimki
Zarechnaya
5.
Узнать
Подробнее
Гостиница Дубки, Химки
ул. Парковая, 8
1,53 км от центра Показать на карте
Узнать
Гостиница Бизнес Химки,
Е
03
143400, Деревня Гаврилково
5,31 км от центра Показать на карте
Запросить
Подробнее
ХОЛИДЕЙ ИНН ЭКСПРЕСС МОСКВА – ХОВРИНО, Химки
Левобережная ул. 12 Levobereжna 12
3,30 км от центра Center Show на карте
Inquire
Читать дальше
Holiday Inn Express Moscow – Airport Sheremetyevo, Khimki
Организация 1V, Mezhdunanoe Shosse Shosse Sheremetyevo Zone
.0003inquire
Читать дальше
Отель Alexandria-SheremetyEvo, Khimki
Quarter Yakovlevo 63
7,14 км от Center Show на карте
Assure
Прочтите больше
Hotel Iskra, Khimki
Repina Strein.
0,90 км от центра Показать на карте
Узнать
Подробнее
Гостиница Тихий Шереметьево, Химки
141400, Квартал Терехово 40
4,21 км от центра Показать на карте
inquire
Читать подробности
Hotel Vintage, Khimki
125445, Leningradskoe Shosse 297
7,39 км от центрального выставки на карте
Прочтите больше
Kore-Vip Hotel, Khimki
4141414141414141414141414.
9,20 км от центра Показать на карте
Спросить
Подробнее
Ласпес, Химки
Ленинградская улица, д. 21
0,91 км от центра Показать на карте
Assul
Читать More
Meridian Hotel, Khimki
141400, Ulitsa Leningradskaya 7
1,63 км от центра Center Show на карте
. км от центра Показать на карте
Спросить
Подробнее
Мини-отель Хата, Химки
Квартал Клязьма 11А
7,30 км от центра Показать на карте
Спросить
Читать Подробнее
Mon Plaisir, Khimki
141408, Rayon Planernaya 14, Khimki
4,90 км от центрального шоу на карте
Inquire
. 3
3.31 км от центра Показать на карте
Спросить
Подробнее
Park Inn by Radisson Аэропорт Шереметьево Москва, Химки
141400, Международное шоссе 1
Показать на карте
от центра0003
Inquire
Читать More
Planernoye Hotel, Khimki
141400, Microrayon Novogorsk
5,10 км от Center Show на карте
inquire
. от центра Показать на карте
от центра Показать на карте
Спросить
Подробнее
Хостел Russian Sky, Химки
Международное шоссе, 1
6,87 км от центра Показать на карте
inquire
Читать Подробнее
Hotel Russian Sky, Khimki
Mezhdunarodnoye Shosse 1
6,89 км от Center Show на MAP
QUINCHIRE
.
2,53 км от центра Показать на карте
Спросить
Подробнее
Парк-Отель Нагорное, Химки
141435, Микрорайон Новогорск
4,71 км от центра Показать на карте
Inquire
Читать Подробнее
Sher Hotel, Khimki
141402, Naberezhny Proezd 25 Bldg 1
6,11 км от центрального шоу на карте
Sky Hostel Sheremety, KHERIMKI,
,
SKEATELELEVEVO, KHERIMKI
SkyLemetev. , корп.1
5.31 км от центра Показать на карте
Спросить
Подробнее
₹
141400, Шереметьево 2, корп.![]() 3Владение 3
3Владение 3
6,88 км от центра
Международное шоссе, д. 1А, Москва 141400
6,95 км от центра
141400, Шереметьевский район, Терминал D, E, F
6,11 км от центра
Московская область, г. Химки, ул.
Ulitsa Panfilova, 21/1
2,42 км от центра
Zarechnaya
5,63 км от центра
8 Parkovaya Street
1,53 км от центра
143400, Derevnia gavrilkooso
143400, Derevnia Gavrilkoo.0002 5,31 км от центра
Левобережная ул. 12 Левобережная 12
3.30 km from centre
Ownership 1V, Mezhdunarodnoe Shosse Sheremetyevo Transport Zone
6.68 km from centre
Quarter Yakovlevo 63
7.14 km from centre
Repina str., 6
0.90 km from centre
141400, Квартал Терехово 40
4,21 км от центра
125445, Ленинградское шоссе 297
7,39 км от центра
141400, Sheremetyevo Airport
9.20 km from centre
Leningradskaya Street, c21
0.