что такое электрогидравлический усилитель рулевого управления
Электрогидравлический усилитель руля (ЭГУР) является гибридной системой рулевого управления. Она использует гидравлическую технологию как вспомогательную, но насос, отвечающий за давление системы, подпитывается не от основного двигателя, а от дополнительного — электрического. Такая конструкция имеет ряд преимуществ перед стандартной гидравлической — об этом более подробно далее.
Принцип работы ЭГУР
Описываемое устройство состоит из:
- электронной части — платы;
- силовой — электродвигателя;
- гидравлической — шестерёнчатого насоса.
В целом принцип работы ЭГУР мало чем отличается от гидравлического рулевого управления (ГУР). Разница лишь в том, что приводное усилие подаётся от самостоятельного электромотора. Это позволяет системе работать в нескольких режимах во время движения автомобиля.
Важно! Главная особенность ЭГУР — чем быстрее движется автомобиль, тем медленнее вращается электродвигатель.
При повороте руля гидравлическая жидкость прекращает циркулировать. Она заполняет полость силового цилиндра, в зависимости от направления поворота руля. Здесь она начинает давить на рейку рулевого механизма через поршень, передавая усилие на рулевые тяги. Из противоположной полости в это время жидкость переходит в бачок, и колёса поворачиваются.
Описанный принцип работы эффективно проявляет себя на малой скорости, когда нужно совершить манёвр в ограниченном пространстве или припарковать машину. Электродвигатель начинает интенсивнее вращаться, из-за чего повышается производительность системы. В результате этого от водителя требуется минимум усилий для поворота руля.
Главные отличия и особенности
Как уже было сказано, основное отличие ЭГУР от ГУР заключается в наличии дополнительного двигателя. Отсутствие передаточного ремня, как у ГУР, позволяет не терять мощность двигателя и не расходовать понапрасну топливо. Кроме этого, есть электронная система управления. Эти элементы позволяют ЭГУР регулировать усилие, учитывая скорость движения авто.
Отсутствие передаточного ремня, как у ГУР, позволяет не терять мощность двигателя и не расходовать понапрасну топливо. Кроме этого, есть электронная система управления. Эти элементы позволяют ЭГУР регулировать усилие, учитывая скорость движения авто.
Знаете ли вы? Впервые ЭГУР появился на модели Honda NSX 1990 года. В 1925 году Фрэнсисом Дэвисом был запатентован первый ГУР.
В электроусилителе гидравлика отсутствует, поэтому и проблем, сопутствующих ей, нет. Двигатель, вмонтированный в рулевую колонку, реагирует на малейшие отклонения руля от нулевого положения. Соответственно, точность в управлении выше, скорость отклика авто — быстрее, а усилий нужно прикладывать минимум.
- компактная конструкция;
- комфортное управление ТС;
- работает при заглушённом двигателе;
- простота выполнения манёвра на малых скоростях;
- точность в управлении на высокой скорости;
- экономия топлива.


Недочёты электрогидравлической системы:
- если колёса длительное время находятся в крайнем положении, то масло перегревается и система быстрее выходит из строя;
- снижена информативность руля на большой скорости;
- выше стоимость и больше проблем с обслуживанием.
Устройство усилителя руля
Электрогидравлическая система рулевого управления включает в себя несколько компонентов, каждый из которых выполняет свою задачу:
- гидравлический насос — подаёт рабочую жидкость в нужный момент;
- электромотор — запускает в работу насос;
- трубопровод — отвечает за транспортировку жидкости;
- узел гидравлического управления системой — реализует механизм усилителя руля;
- электронная система управления — следит за скоростным режимом и подбирает соответствующее усилие, необходимое для передачи на рулевое колесо;
- электронный блок управления усилителя — собирает и анализирует сигналы с датчиков и посылает нужные команды предыдущей системе.

Трудности ТО и ремонта электрогидроусилителя
Так как ЭГУР вобрал в себя качества и электро-, и гидроусилителя, то вероятность поломки возрастает в разы, так как может выйти из строя электроника и гидравлика, по отдельности либо вместе. Соответственно, ТО занимает больше времени из-за того, что нужно проверить обе системы, а также требует наличия двух специалистов разного профиля в автомастерской.
Важно! Если по электрике проблем нет, то работу по проверке ГУР продолжает обычный автомеханик. В противном случае за дело берётся автомеханик-электрик.
Осмотр автомобиля с электрогидроусилителем для выявления неисправностей проходит по таким этапам:
- Проверка масла.
- Проверка контакта в электросистеме (подключение проводов, их целостность), датчика крутящего момента.
- Проверка целостности предохранителя на электромоторе.
Гидроэлектроусилитель руля значительно облегчает управление автомобилем и делает его максимально комфортным. К тому же если машина быстро реагирует на действия водителя, снижается риск попадания в ДТП. Конечно, ЭГУР добавляет хлопот в обслуживании авто, но если делать всё вовремя, то непредвиденные ситуации будут возникать реже.
К тому же если машина быстро реагирует на действия водителя, снижается риск попадания в ДТП. Конечно, ЭГУР добавляет хлопот в обслуживании авто, но если делать всё вовремя, то непредвиденные ситуации будут возникать реже.
Подписывайтесь на наши ленты в таких социальных сетях как, Facebook, Вконтакте, Instagram, Pinterest, Yandex Zen, Twitter и Telegram: все самые интересные автомобильные события собранные в одном месте.
Электрогидроусилитель руля
просмотров 5 944 Google+
Электрогидроусилитель руля (ЭГУР) это переходная система от гидроусилителя (ГУР) к электроусилителю (ЭУР) руля. Преимущество его перед ГУРом значительны. Начиная с уменьшения расхода бензина, насос работает не постоянно, до регулировки усилия в зависимости от скорости и режима вождения. Недостатком можно считать наличие гидравлического насоса.
Недостатком можно считать наличие гидравлического насоса.
Электрогидроусилитель руля принцип работы
Рабочая жидкость наполняет резервуар, после переходит в насос ГУР по соединительному шлангу. При повороте руля блок управления подаёт питание на электродвигатель, который включается и начинает вращать вал насоса ГУРа с частотой, зависящей от скорости автомобиля и усилия приложенного к рулю. Так же питание подаётся на соответствующий электроклапан, в зависимости от направления поворота. Насос создаёт давление жидкости и передает ее через соответствующий клапан в гидроцилиндр. Гидроцилиндр энергией рабочей жидкости образует силу, пропорциональную давлению жидкости, которая движет поршнем и штоком, далее они повернут нужным образом колеса системой рычагов.
Электрогидроусилитель руля рабочие параметры насоса:
Допустимый зазор между составляющими частями — 0,005-0,001 мм. Отклонение от допустимого значения влечет за собой падение давления жидкости на холостом ходу и как следствие ощущение тугого руля и визг на поворотах.
В зависимости от автомобиля рабочее давление — 150 Бар
При эксплуатации ЭГУ руля возможны неисправности, при которых его эксплуатация невозможна. При включении зажигания блок управления производит тестирование электрической части. Если при этом обнаруживается неисправность, то происходит отключение ЭУР. При неисправности же насоса отключение не происходит, а ЭУР может работать частично, так как давление будет недостаточным.
Основные причины неработоспособности насоса:
Несвоевременная замена рабочей жидкости в системе.
Применение некачественной или жидкости, которая не подходит для данной модели автомобиля.
Попадание грязи или инородных тел (сгусток промасленной пыли, которая обычно скапливается вокруг крышки горловины масляного резервуара, бывает частой причиной выхода насоса из строя).
Отсутствие герметичности и как следствие вытекание рабочей жидкости. После чего система завоздушивается и выходит из строя.
Масляное голодание из-за перегиба масляных магистралей.
Значительный перегрев системы, или систематический незначительный.
Ошибки во время монтажа, некачественная сборка.
Во время эксплуатации детали насоса ГУР по мере изнашивания насыщают рабочую жидкость системы металлической пылью или даже мелкими металлическими частицами. Когда приходит время заменить старый насос ГУР на новый, вся система гидроусилителя руля должна быть тщательно промыта, также подлежат замене элементы, в которых скопились продукты износа. Проигнорировав это указание, вы рискуете тем, что новый насос в кратчайшие сроки будет выведен из строя. admin 02/04/2015 «Если Вы заметили ошибку в тексте, пожалуйста выделите это место мышкой и нажмите CTRL+ENTER» “Если статья была Вам полезна, поделитесь ссылкой на неё в соцсетях”
Электрогидроусилитель руля принцип работы – Автомобильный портал AutoMotoGid
В современных автомобилях есть такое устройство, как электрогидроусилитель руля. Как понятно из названия, он нужен, чтобы облегчить усилия, прилагаемые к рулю во время движения. Говоря простым языком, он нужен для того, чтобы рулевое колесо легче крутилось. Все водители, которые учились водить на машинах, сделанных в СССР знают о том, как трудно на этих машинах крутился руль. Поэтому это приспособление очень повышает комфорт во время движения.
Как понятно из названия, он нужен, чтобы облегчить усилия, прилагаемые к рулю во время движения. Говоря простым языком, он нужен для того, чтобы рулевое колесо легче крутилось. Все водители, которые учились водить на машинах, сделанных в СССР знают о том, как трудно на этих машинах крутился руль. Поэтому это приспособление очень повышает комфорт во время движения.Устройство
Электрогидравлический тип усилителя рулевого управления состоит из нескольких компонентов. Все эти устройства выполняют свою задачу. Накачивающий агрегат, он состоит из двух частей.
- Первая часть системы рулевого усилителя – это насос гидравлический рулевого управления, он подкачивает жидкость в нужный момент. Второе устройство – это электрический мотор, он заставляет качать насос. Третий элемент системы усилителя руля – это трубопровод, по которому течет жидкость. В некоторых системах рулевого усилителя устанавливается специальный блок электронного управления.
- Вторым компонентом системы является узел гидравлического управления системой. Считается исполнительным органом системы, который напрямую прикреплен к рулевому механизму.
- Третьим агрегатом считается система электронного управления. Эта система распознает скорость машины и прилагает нужные усилия к рулевому колесу.
- Четвертым агрегатом считается электронный блок управления рулевого усилителя. Он распознает все сигналы датчиков и отправляет нужные команды системе электронного управления.
 Считается исполнительным органом системы, который напрямую прикреплен к рулевому механизму.
Считается исполнительным органом системы, который напрямую прикреплен к рулевому механизму.Следует отметить, что к исполнительным органам рулевого механизма относится не только узел гидравлического управления, сюда еще входят другие компоненты, такие как: специальный клапан, который открывается и закрывается по сигналам приборов, и электродвигатель насоса, который управляет скоростью вращения рулевого вала.
Принцип действия
Электрогидравлический тип усилителя рулевого управления устроен так, что во время движения он работает в различных режимах. В то время, когда машина движется прямо, гидравлическая система обеспечивает циркуляцию жидкости в трубопроводе. Это нужно для, чтобы жидкость была нужной температуры и нужного химического состава.
Это нужно для, чтобы жидкость была нужной температуры и нужного химического состава.
В тот момент, когда водитель начинает поворачивать, в этой системе происходит следующее.
- Во-первых, закручивается торсион, который открывает каналы для поступления жидкости в них.
- Во-вторых, жидкость перетекает в открывшуюся часть, а из закрывшейся части перетекает обратно в распределительный бачок.
- В-третьих, во время поступления жидкости поршень перемещает рулевую рейку.
- В-четвертых, за счет вышеперечисленных действий в системе появляется дополнительное усилие, которое способствует повороту колес.
Главная особенность этого типа усилителя заключается в том, что он работает даже тогда, когда машина стоит на месте или с выключенным зажиганием. Дело в том, что усилие создается специальным насосом. Отличие работы системы во время движения и когда автомобиль стоит на месте заключается лишь в том, что насосу приходится прилагать большие усилия, чтобы облегчить усилия, которые приложит водитель, чтобы провернуть руль.
Ремонт
Несмотря на всю простоту схемы и конструкции, здесь часто в негодность приходит насос. Поэтому многие пытаются произвести ремонт своими силами, найдя схемы в Интернете. На самом деле в устройстве насоса все сложнее, чем кажется на первый взгляд после просмотра схемы.
- Во-первых, для того чтобы ремонтировать насос, нужно сначала произвести диагностику и точно определить, что сломан именно он.
- После этого следует снять старый и купить новый насос.
- Чтобы снять старый насос, потребуется подробно изучить эту схему. На схеме подробно сказано о том, как и где откручиваются все болты, которые крепят насос. По этой же схеме можно поставить новый насос. Грамотно заменить насос с первого раза возможно только после изучения схемы.
Ремонтировать старый насос следует только в том случае, когда есть запасной, ведь неопытные мастера часто только пытаются сделать это устройство, но редко у кого получается это.
Вся беда самостоятельного ремонта заключается в том, что человек, который пытается сделать этот насос, покупает новую часть механизма, которая нередко стоит примерно большую часть от нового насоса, а после ее установки механизм может не работать. Дело в том, что производитель новой части редко думает о том, точно ли она подойдет в то устройство, из-за чего и происходит окончательная поломка.
Дело в том, что производитель новой части редко думает о том, точно ли она подойдет в то устройство, из-за чего и происходит окончательная поломка.
Резюме
Каждый водитель, который хотя бы раз ездил на машине с усилителем руля, уже не захочет садиться в машину без него. Как говорится, к хорошему быстро привыкаешь, и поэтому сегодня невозможно представить себе автомобиль без усилителя руля. Сегодня существует несколько разновидностей усилителей руля, которые имеют свои достоинства и недостатки. Все они отличаются только принципом привода усилителя. Схемы у них похожи и принцип работы тоже.
Много вопросов возникает по поводу рулевых усилителей ГУР и ЭУР. А оказывается есть и ЭГУР.
Так как несколько раз меня поправляли, что я такой тупой и путаю буквы, решил написать этот блог. Хотя что писать, все есть в сети. Я просто скопирую, наведу красоту, вставлю картинки.
Электро-гидравлические системы рулевого управления с усилителем, иногда аббревиируемые как ЭГУР, и также иногда называемые «гибридными» системами, используют такую же вспомогательную гидравлическую технологию как и в стандартной системе, но гидравлическое давление в них обеспечено насосом, который приводится в движение электродвигателем, вместо ременного привода от двигателя.
От себя.
Короче так. Убрали ремень, а привод насоса крутит электромотор, который управляется контроллером.
Электро-гидравлические системы могут быть найдены в некоторых автомобилях Форд, Фольксваген, Ауди, Пежо, Ситроен, Шкода, Suzuki, Opel, МИНИ-, Тойота, Хонда, и Мазда
Электрогидравлический усилитель руля работает в зависимости от скорости поворота рулевого колеса и скорости автомобиля.
Насосный агрегат усилителя руля состоит из шестеренного насоса и электродвигателя.
Вместо лопастного насоса (у обычных усилителей руля) в насосном агрегате электрогидравлического усилителя используется шестеренный насос.
Этот насос приводится не от двигателя автомобиля, а от встроенного в насосный агрегат электродвигателя.
Электродвигатель работает только при включенном зажигании и работающем двигателе автомобиля.
Обычно насосный агрегат выполнен в виде единого блока.
Кронштейн насосного агрегата закреплен болтами на лонжероне между передним бампером и колесной нишей. Насосный агрегат подвешен к кронштейну посредством упругих резиновых элементов.
Насосный агрегат подвешен к кронштейну посредством упругих резиновых элементов.
Электронный блок управления усилителем
Для работы насоса необходимы следующие сигналы
1. Частота вращения вала двигателя автомобиля.
2. Скорость автомобиля.
3. Скорость поворота рулевого колеса.
Основные функции
Блок управляет приводом шестеренного насоса в зависимости от скорости поворота рулевого колеса и скорости автомобиля.
Дополнительные функции
Защита усилителя руля от перегрева.
Защита от повторного включения при неисправности.
Бортовая диагностика
Блок управления распознает возникающие в процессе эксплуатации неисправности и регистрирует их в ПЗУ.
Если ввести быстрый поиск то, с ним мучаются владельцы: Ford Focus 2, пежо 307, шкода фабия, опель вектра и астра, шкода румстер.
Системы рулевого управления с электро-гидравлическими усилителями.
Электро-гидравлические системы рулевого управления с усилителем, иногда аббревиатируемые как ЭГУР. Также называются «гибридными» системами. Как и стандартные системы используют вспомогательную гидравлическую технологию, но обеспечивающий рабочее давление гидравлический насос приводится в движение электродвигателем, вместо отбора мощности от основного двигателя транспортного средства.
Также называются «гибридными» системами. Как и стандартные системы используют вспомогательную гидравлическую технологию, но обеспечивающий рабочее давление гидравлический насос приводится в движение электродвигателем, вместо отбора мощности от основного двигателя транспортного средства.
История [ править | править код ]
В 1965 Форд экспериментировал с парком «управление моментального поворота запястьем» оборудованного Mercury Park Lanes, который заменял обычный большой руль двумя 5-дюймовыми (127-миллиметровыми) кольцами, с быстротой передаточного отношения 15:1, и электрический гидравлический насос в случае, если двигатель остановился. [1] [2]
В 1990 Тойота представила своё второе поколение MR2 с рулевым управлением с электро-гидравлическим усилителем. Это должно было исключить управление гидравлическими линиями от двигателя (которые были расположены позади водителя в MR2) до центральной стойки.
В 1994 Фольксваген произвел 3-ю марку Гольфа Ecomatic, который использовал электрический насос так, чтобы рулевое управление с усилителем могло работать, в то время как двигатель был выключен компьютером, чтобы сэкономить топливо. [3] Электро-гидравлические системы могут быть найдены в некоторых автомобилях Форд, Фольксваген, Ауди, Пежо, Ситроен, Шкода, Suzuki, Opel, МИНИ-, Тойота, Хонда, и Мазда.
[3] Электро-гидравлические системы могут быть найдены в некоторых автомобилях Форд, Фольксваген, Ауди, Пежо, Ситроен, Шкода, Suzuki, Opel, МИНИ-, Тойота, Хонда, и Мазда.
Servotronic обеспечивает точную зависимость рулевого управления с усилителем от скорости, в котором количество подключенных сервомоторов, зависит от скорости движения, и таким образом предоставляет даже больше комфорта водителю. Количество усиления сильнее при низких скоростях, например, при парковке автомобиля. Большая поддержка облегчает маневрирование автомобиля. На более высоких скоростях электронная система датчиков постепенно уменьшает уровень усиления управления. Таким образом, водитель может управлять автомобилем ещё более точно (с рулевым управлением со стандартным усилителем при повышении скорости гидроусилитель полностью отключается). Servotronic используется многими автомобилестроителями, включая Ауди, General Motors, БМВ, Фольксваген, Вольво, Сеат и Порше. Servotronic — торговая марка AM General Corp. [4]
[4]
Система позволяет инженерам адаптировать рулевой механизм к переменным скоростям и амортизации системы подвески, для достижения идеального сочетания сглаживания езды, и управления для каждого транспортного средства. [5] На автомобилях группы Фиат величина усиления может регулироваться, нажатием кнопки с надписью «ГОРОД», который переключается между двумя отличающимися траекториями поворота, в то время как у большинства других систем EPS есть переменная усиления, которая учитывает больше помощи при уменьшении скорости транспортного средства и меньше помощи со стороны системы во время быстрой езды. В случае отказа данного компонента, механические соединения, такие как стойка и зубчатый валик служит резервными, подобно гидравлической системе. Электрический усилитель руля не стоит путать с сервоприводом или проводными рулевыми системами, которые используют электродвигатели для того, чтобы управлять колёсами, но без какого либо механического соединения с рулем.
У электрических систем есть небольшое преимущество в топливной экономичности, потому что нет никакого гидравлического насоса с ременным приводом, постоянно работающего вне зависимости от того, требуется ли помощь или нет, и это — главная причина их внедрения.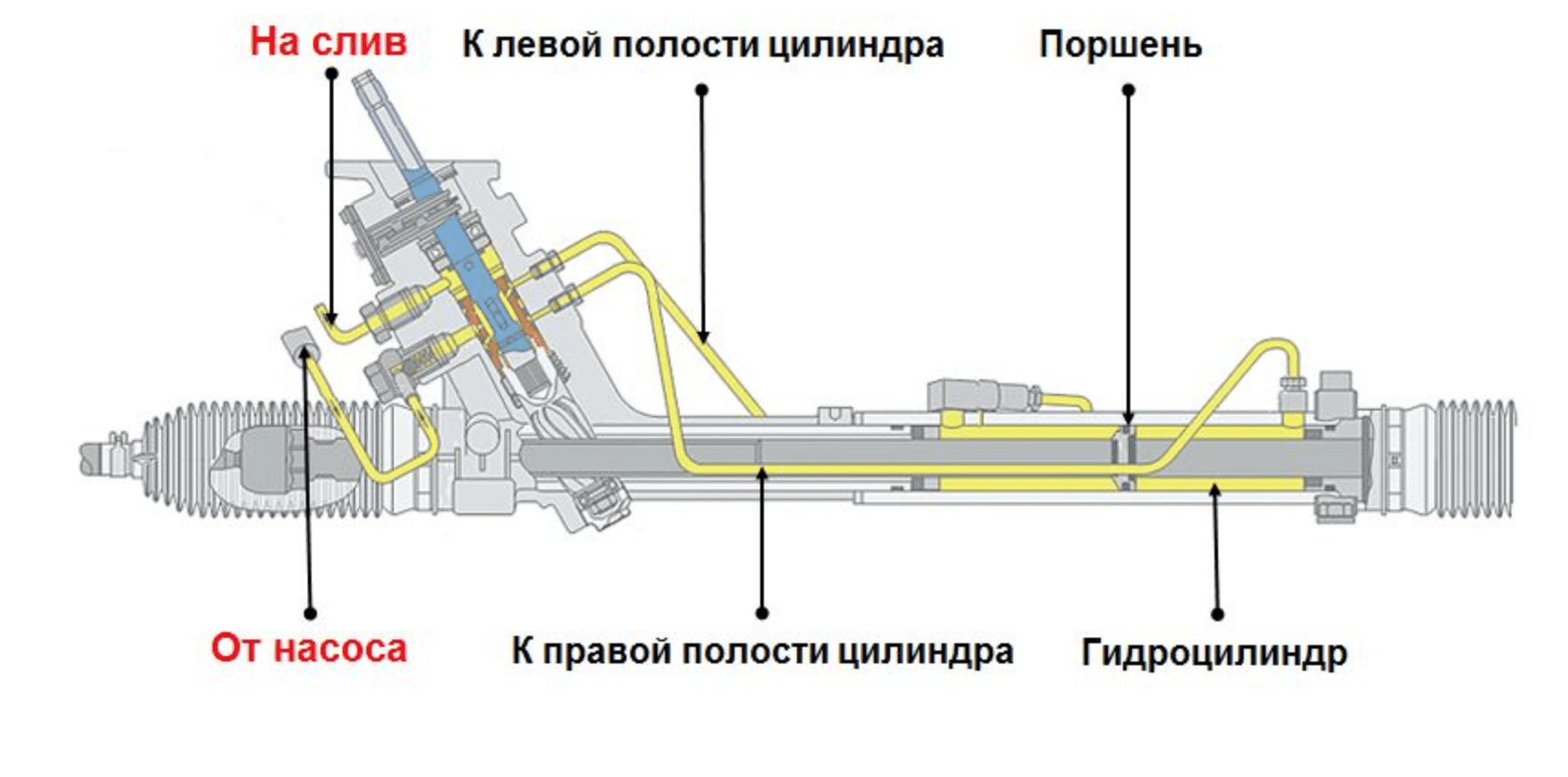 Другое главное преимущество — устранение машинного компонента с ременным приводом, и несколькими гидравлическими шлангами высокого давления между гидравлическим насосом, установленным на двигателе, и механизмом управления, установленным на шасси. Это значительно упрощает производство и обслуживание. Включив электронный контроль устойчивости, электрические системы усилителя руля можно мгновенно изменить уровень поддержки, изменяя вращающий момент, чтобы помочь водителю при корректирующих маневрах.
Другое главное преимущество — устранение машинного компонента с ременным приводом, и несколькими гидравлическими шлангами высокого давления между гидравлическим насосом, установленным на двигателе, и механизмом управления, установленным на шасси. Это значительно упрощает производство и обслуживание. Включив электронный контроль устойчивости, электрические системы усилителя руля можно мгновенно изменить уровень поддержки, изменяя вращающий момент, чтобы помочь водителю при корректирующих маневрах.
Максимальная полезная мощность электрической системы транспортного средства ограничивает пределы возможностей электрической системы оказания помощи. 12-вольтная электрическая система, например, ограничивается 80-ю амперами тока, что в свою очередь ограничивает размер двигателя до пределов менее 1 кВт. Это количество энергии больше подходит для транспортных средств небольшого размера. Но скорее всего, не хватило бы для больших машин, таких как грузовики и внедорожники.существуют и другие типы электросистем, такие как 24-х вольтная и др. разновидности, используемые в гибридных авто и электромобилях. Они имеют большую выходную производительность, которая позволяет использовать двигатели большей мощности необходимых для больших и среднеразмерных транспортных средств.
разновидности, используемые в гибридных авто и электромобилях. Они имеют большую выходную производительность, которая позволяет использовать двигатели большей мощности необходимых для больших и среднеразмерных транспортных средств.
Первые электрические системы управления появились на Honda NSX в 1990, FIAT Punto Mk2 в 1999, Honda S2000 в 1999, Toyota Prius в 2000 [6] и на BMW Z4 [7] в 2002. Сегодня многие изготовители используют электронное управление.
Обзоры в автомобильной прессе часто комментируют, что определенные системы управления с электрическим усилителем не дают достаточного «чувства дороги». Чувство дороги подразумевает под собой отношение между силой, необходимой для управления транспортным средством и усилием, которую водитель прилагает к рулю. Чувство дороги дает водителю субъективное восприятие, которое он использует при управлении транспортным средством. Величиной чувства дороги (информативности руля) управляет компьютерный модуль, который управляет руководящей системой электроэнергии. В теории программное обеспечение должно быть в состоянии приспособить количество дорожного чувства, чтобы удовлетворить водителей. На практике, трудно учесть различные ограничения конструкции, производя более яркую информативность руля. Тот же самый аргумент также был применен к рулевому управлению с гидравлическим усилителем.
В теории программное обеспечение должно быть в состоянии приспособить количество дорожного чувства, чтобы удовлетворить водителей. На практике, трудно учесть различные ограничения конструкции, производя более яркую информативность руля. Тот же самый аргумент также был применен к рулевому управлению с гидравлическим усилителем.
Что лучше — ГУР, ЭУР или ЭГУР? — журнал За рулем
Казалось бы, усилители рулевого управления делятся лишь на гидравлические и электрические. Однако у этого принципиального деления есть свои подвиды. Причем все они имеют эксплуатационные особенности и дарят различные ощущения при езде.
Удовольствие от вождения конкретного автомобиля сложно описать словами, но можно попытаться объяснить его конструктивными особенностями. Если говорить об информативности рулевого управления, то кроме архитектуры шасси автомобиля в целом важную роль играет тип его усилителя.
Неинформативный, или «ватный», руль, его плохой самовозврат, слабая обратная связь с дорогой и так далее — все эти моменты зависят в первую очередь от конструкции рулевой системы. Основополагающую роль здесь играют потери на трение и паразитный момент инерции.
Основополагающую роль здесь играют потери на трение и паразитный момент инерции.
рулевое управление
При выборе типа усилителя рулевого управления лучше ориентироваться именно на ездовые ощущения. Гидравлические и электрические системы имеют серьезные конструктивные отличия и свои слабые и сильные стороны.При выборе типа усилителя рулевого управления лучше ориентироваться именно на ездовые ощущения. Гидравлические и электрические системы имеют серьезные конструктивные отличия и свои слабые и сильные стороны.
Материалы по теме
Эталонная система — гидравлический рулевой редуктор. Это механизм так называемого типа «винт — шариковая гайка». Зачастую его применяют на грузовом транспорте и автобусах, но раньше его также ставили и на дорогие седаны, например на Mercedes-Benz с кузовным индексом W124. Механизм отличается минимальным внутренним трением и дополнен гидравлическим усилителем. При повороте руля вращается входной вал редуктора с винтовыми канавками. Такие же сделаны и на внутренней части закрепленной на нем гайки. Вращение вала вызывает ее осевое перемещение. Внешняя часть гайки соединена зубьями с выходным валом редуктора. Таким образом, ее осевое перемещение вновь преобразуется во вращательное. Трение в паре «входной вал — гайка» снижено за счет циркуляции шариков в канавках. По сути, это подшипниковый узел.
Такие же сделаны и на внутренней части закрепленной на нем гайки. Вращение вала вызывает ее осевое перемещение. Внешняя часть гайки соединена зубьями с выходным валом редуктора. Таким образом, ее осевое перемещение вновь преобразуется во вращательное. Трение в паре «входной вал — гайка» снижено за счет циркуляции шариков в канавках. По сути, это подшипниковый узел.
Увы, с массовым приходом привычных рулевых реек внутренние трения неизбежно возросли, а с появлением электрических усилителей (электродвигателей) добавились еще и паразитные моменты инерции. С тех пор инженеры с переменным успехом пытаются привить современным механизмам ту эталонную информативность, присущую легковым рулевым редукторам.
Классический гидравлический усилитель руля (ГУР)
Даже в обычной механической рулевой рейке без усилителя есть приличное внутреннее трение. Больше всего потерь, как ни странно, в зубчатой паре «входной вал — рейка». Свое трение есть также в опорной втулке и сухаре. В случае рейки с гидравлическим усилителем сюда добавляются и сальники.
Классический ГУР
Классический ГУР по-прежнему устанавливают на многие машины. Кроме наличия расширительного бачка под капотом его сразу выдает внешний вид рейки с гидравлическими контурами.Классический ГУР по-прежнему устанавливают на многие машины. Кроме наличия расширительного бачка под капотом его сразу выдает внешний вид рейки с гидравлическими контурами.
Материалы по теме
Дополнительные трения ухудшают самовозврат рулевого колеса и обратную связь с дорогой, делая руль ватным и неинформативным. Но инженеры отчасти нивелировали эти моменты. Они увеличили кастор на современных автомобилях (продольный наклон оси передних стоек) и поколдовали над гидравлической частью усилителя: изменили геометрию и характеристики золотниковых клапанов. Благо здесь бал правит только механика. Впрочем, человек, поездивший на легковом автомобиле с рулевым редуктором, все равно ощутит явную разницу.
При эксплуатации таких усилителей больше всего хлопот доставляет гидравлическая часть, например: течи сальников и внешних магистралей; износ насоса ГУР. Однако львиная доля проблем связана с неадекватным вмешательством. При банальной замене рулевых тяг сервисмены ленятся правильно установить пыльники, применяя вместо штатных металлических хомутов обычные пластиковые стяжки. В результате в рейку попадает влага, вызывая коррозию. В запущенных случаях ремонт будет уже невозможен и узел придется менять с сборе. Об этом мы подробно писали в материале про основные неисправности и ремонт рулевых реек. В целом, на сегодняшний день классический ГУР доставляет меньше всего хлопот и требует вменяемых затрат при ремонте по сравнению с остальными вариациями усилителей.
ЭГУР — электрогидравлический усилитель
ЭГУР — это лишь вариация схемы классического гидроусилителя с теми же самыми ощущениями при езде и проблемами в целом. Разница лишь в том, что вместо механического насоса применен электрический. В остальном это та же гидравлическая рейка и контуры. Однако при попытке копнуть глубже всплывает масса скрытых отличий, хороших и не очень.
ЭГУР
ЭГУР можно опознать по отсутствию механического насоса в приводе навесного оборудования двигателя. Электрический насос стоит отдельно. Сегодня таким усилителем оборудуют многие модификации автомобилей концернов Renault-Nissan и GM.ЭГУР можно опознать по отсутствию механического насоса в приводе навесного оборудования двигателя. Электрический насос стоит отдельно. Сегодня таким усилителем оборудуют многие модификации автомобилей концернов Renault-Nissan и GM.
В такой системе есть отдельный модуль управления. Беда в том, что он объединен в единый сборный узел с электромотором насоса и его гидравлической частью. На многих возрастных машинах герметичность такого бутерброда нарушается и в электронику попадает влага или даже само масло. Происходит это незаметно, и когда дело доходит до явных проблем в работе усилителя, то уже поздно пытаться что-то ремонтировать. Придется менять дорогостоящие элементы.
С другой стороны, у такой схемы со своим блоком управления, в отличие от классического ГУРа, есть важный плюс — своего рода «защита от дурака». Если по какой-то причине произойдет большая утечка масла из системы, то она сама отключит насос, предотвратив его скоропостижную смерть из-за работы на сухую. Как и в случае с классическим гидроусилителем, любая кровопотеря не влечет износа элементов в самой рейке.
Электрический усилитель (ЭУР), встроенный в рулевую колонку
С появлением элекрических усилителей в чистом виде к потерям на трение в рулевых механизмах добавился паразитный момент инерции. Вместо гидравлики и насоса пришли электродвигатели, встроенные в саму рейку или стоящие вне ее. Благодаря их вращению в ту или иную сторону осуществляется помощь при повороте руля. Однако ротор любого электродвигателя имеет свою массу и, следовательно, момент инерции. Поэтому его невозможно мгновенно остановить и изменить направление вращения. Электронике нужно время, чтобы адаптироваться. Этот момент выражается во временном дополнительном сопротивлении на руле, когда человек резко меняет направление его вращения на ходу.
ЭУР
ЭУР с элементами усилителя, встроенными в рулевую колонку, — самая дешевая вариация. Поэтому она и нашла свое массовое применение в бюджетном сегменте автомобилей.ЭУР с элементами усилителя, встроенными в рулевую колонку, — самая дешевая вариация. Поэтому она и нашла свое массовое применение в бюджетном сегменте автомобилей.
Материалы по теме
Вдобавок большая часть схем усилителя с электромотором снабжена еще и червячным редуктором. В частности, это касается систем, где ЭУР встроен в рулевую колонку. Из-за этого дополнительно возрастают потери на трение. В результате информативность руля падает еще сильнее, чем в случае с гидроусилителем. Настроить электронику так, чтобы существенно нивелировать подобный недостаток, невозможно. Поэтому человек, пересевший с автомобиля с ГУРом за ЭУР, сразу почувствует разницу и, вероятно, будет разочарован.
В схеме с элементами усилителя в рулевой колонке мы имеем обычную механическую рейку. Простота ее конструкции гораздо предпочтительнее сложного и технологичного гидроузла. Однако и у этой медали есть обратная сторона. В случае возникновения внутренней коррозии обычная рейка будет молчать до последнего, пока валы катастрофично не сгниют и ремонтировать будет уже нечего. Гидравлический же узел очень быстро начнет течь из-за износа сальников, и восстановление будет стоить вменяемых денег.
В защиту такого типа ЭУРа можно добавить, что электронная часть в рулевой колонке отказывает крайне редко. А по ресурсу система, в целом, сопоставима с привычным гидравлическим собратом.
Электрический усилитель (ЭУР) с червячным приводом, встроенным в рулевую рейку
ЭУР
ЭУР с червячным приводом, встроенным в рулевую рейку, легко отличить по внешнему виду. Электромотор присоединен к ее корпусу рядом с входным валом.ЭУР с червячным приводом, встроенным в рулевую рейку, легко отличить по внешнему виду. Электромотор присоединен к ее корпусу рядом с входным валом.
Этот вид открывает группу полноценных электрических реек со встроенными элементами усилителя. По сути, такой ЭУР имеет те же негативные особенности при езде, что и в предыдущем примере. Величина паразитных потерь на трение и моментов инерции схожа.
В процессе эксплуатации тяжесть неисправностей и стоимость ремонта увеличивает то, что все элементы усилителя встроены в рейку.
Гидроусилитель руля (ГУР) – устройство, принцип работы, недостатки
В последнее время, практически все автомобили комплектуются гидроусилителем рулевого управления. Гидроусилитель руля (ГУР) изначально был предназначен для грузовых автомобилей, а также многих всевозможных видов различной техники сельскохозяйственного назначения. В то время данное устройство было предназначено вовсе не для улучшения комфорта. Это связано с тем, что руль многих грузовых автомобилей практически невозможно повернуть без усилителя. Сейчас же он упрощает поворот колес и легковых автомобилей, уменьшая передаточное число механизма и диаметр рулевого колеса. Что же такое гидроусилитель руля и как он работает, а также рассмотрим его достоинства и недостатки.
Гидроусилитель – что это и зачем
Как вы уже поняли, изначально он создавался для упрощения поворота рулевого колеса на специальных автомобилях, где он затруднен в связи с большим передаточным числом рулевого механизма. Сейчас же это устройство успешно применяется практически на всех автомобилях, делая их маневреннее и отзывчивее на повороты руля.
Практика показала, что применение гидроусилителя сокращает количество оборотов руля и помогает избежать множества аварийных ситуаций, путем резкого маневра в противоположную сторону. Сделать это с обычным рулевым механизмом даже реечного типа достаточно проблематично.
Схема устройства ГУР
Всего существует два вида гидроусилителей рулевого механизма: стандартный и ЭГУР, который комплектуется специальным электронным блоком управления и электромагнитным клапаном. В целом их конструкция схожа и прекрасно впишется в любой рулевой механизм. Сейчас же, большая часть автомобилей комплектуется рулевой рейкой, поэтому рассмотрим устройство ГУР и ЭГУР на ее примере.
В состав основных частей гидроусилителя входят:
- Распределитель золотникового типа
- Специальный насос
- Бачок, в котором хранится рабочая жидкость
- Рабочий цилиндр
- Система шлангов патрубков для перемещения жидкости
ЭГУР же может дополнительно комплектуется датчиком скорости, электромагнитным клапаном и специальным блоком управления.
Рабочий цилиндр и распределитель устанавливаются на рулевую рейку и представляют с ним единое целое. Назначение насоса заключается в том, чтобы создать необходимое давление жидкости и приводится в движение при помощи ременной передачи от коленчатого вала двигателя.
Как работает усилитель рулевого управления + Видео
После запуска двигателя, масляный насос начинает вращаться и создает давление внутри системы. Если руль стоит прямо, то жидкость просто циркулирует по системе, минуя золотниковую часть устройства. Однако, после поворота руля в какую либо сторону, рулевой вал воздействует на специальный торсион, который открывает золотник в какую-либо сторону. Таким образом, в работу начинает входить одна из полостей рабочего цилиндра, что упрощает усилие, прилагаемое на руль, колеса начинают поворачиваться быстрее.
Как только руль выворачивается до упора, масло достигает пиковой величины давления, оказываемого на рабочий цилиндр. В этом случае, чтобы избежать повреждений, срабатывает специальный клапан, который открывается и выпускает всю рабочую жидкость в свободную циркуляцию внутри системы. После возврата руля в исходное положение, клапан запирается, и рабочий цилиндр давит уже в другую полость, делая поворот руля быстрее.
Отличие электрогидроусилителя состоит в том, что он оборудован системой, которая позволяет менять давление рабочей жидкости внутри системы в зависимости от скорости движения автомобиля. Это осуществляется при помощи датчика скорости, частоты вращения коленчатого вала или датчика угла поворота рулевого колеса. Такое новшество позволяет отключать ЭГУР при движении на большой скорости, чтобы избежать слишком резких маневров и сделать руль более информативнее на какие-либо отклонения. Когда скорость автомобиля равна нулю, или слишком мала, то ЭГУР начинает работать на полную силу, создавая максимально допустимое давление в системе. Контроллер же нужен для более плавного или резкого открытия клапанов в зависимости от скорости движения автомобиля.
Недостатки
Несмотря на все удобство, такое устройство имеет и ряд недостатков. Прежде всего, это ременная передача, которая отбирает у двигателя определенную величину мощности и некоторая часть его КПД затрачивается на приведение в действие насоса. Таким образом, ГУР увеличивает расход топлива автомобиля и снижает его мощность.
Кроме того, гидроусилитель нуждается в тщательном уходе, потому как его неожиданный отказ воспринимается водителем, как клин рулевого колеса. Понимая это не сразу, неопытные шоферы бросаются в панику и допускают случайные столкновения с определенными препятствиями. Прежде всего, нужно поддерживать постоянную затяжку хомутов гидросистемы, а, во-вторых, менять жидкость ГУР два раза в год и следить за состоянием гидронасоса.
Бачок с рабочей жидкостью должен быть обязательно заполнен ею до необходимого уровня, иначе давление будет слишком избыточным или недостаточным.
устройство и принцип работы, схема рулевого управления с ГУРом
Гидроусилитель руля (аббревиатура ГУР) — знакома большинству автолюбителей. Относится она к основной части рулевого механизма. Раньше управление машиной, было очень утомительным занятием, так как приходилось при резкой смене траектории напрягаться для поворота рулевого колеса, особенно это было проблематично на грузовых машинах. Конструкторы, которые всегда совершенствуют детали для удобства, комфорта и безопасности, обратили на это внимание, поэтому рулевое колесо стало не исключением. Чтобы свисти усилие к минимуму, была придумана система гидроусилителя руля.
Основным его предназначением, как и было, задумано выступает, комфортное управление машиной в момент движения, но есть и другие не менее важные заслуги, такие как:
- сохранение «обратной связи»;
- обеспечение устойчивости на дороге;
- повышение безопасности. То есть происходит контроль над ТС после повреждения передней шины и возможность увильнуть от столкновения;
- позволяет «чувствовать» дорожное полотно и создает кинематическое следящее действие;
- уменьшает передаточное отношение рулевой системы, что повышает маневренность;
- продлевает время службы деталей рулевого узла.
Гидроусилитель руля
По конструкции ГУР компактны и могут поглощать удары, с вибрацией отходящие от дорожного полотна на рулевое колесо. Во время использовании они совершенно бесшумны. С их появлением езда стала безаварийной, даже число парковочных мест снизилось вдвое. Имея в авто гидроусилитель сложные повороты и многоразовые маневры стали даваться на ура. Однако многие не знают принципа работы установленного штатного гидроусилителя, а когда транспортное средство уводит в сторону они пытаются разрешить ситуацию на «сход-развале» делая это неверно. Естественно, бывалые развальщики легко могут выставить углы установки колес для правильного «сопротивления» увода машины вбок, если гидроусилитель неисправен.
Чтобы устройство не подводило и надежно выполняло все предписанные задачи нужно своевременно посещать сервисные центры для диагностики.
Шаг в историю
Так как первые машины по конструкции были не увесистыми и с узкими колесами, то для поворота руля не требовалось особых усилий. Но с появлением первых грузовых автомобилей вращать колеса многотонного грузовика, оказалось занятием достаточно трудоемким, а то и вовсе не посильным. Тут-то и потребовалось уменьшить диаметр «баранки» и изменить устройство рулевой рейки. Изобрел и запатентовал гидроусилитель впервые Фредерик Ланчестер. Сначала, благо автомеханики распространилось только на карьерные самосвалы, пожарные и грузовые машины. Предвестники пневмоусилители — были несложными и подпитывались от компрессора уже существующих пневматических тормозов.
Только в 20-х годах XX-го века компания Rolls-Royse оснастила гидроусилителем машину-визитку Phantom. Понятное дело, гидравлические усилители были сложнее, чем уже существующие пневматические. Но попытка не увенчалась успехом, и эксперимент был отложен на несколько лет. Дальше уже во время Второй мировой войны англичане вновь ввели в работу ГУР, установив его на большие бронированные автомобили. И уже спустя пять лет технология плотно закрепилась в европейском и американском автопроме. С тех пор устройство не претерпевало принципиальных изменений. Сегодня разнообразие системы ГУРа впечатляет, помимо него существуют еще две удивительных технологии облегчающие эксплуатацию транспортных средств – Электроусилитель и Электрогидроусилитель.
Разновидности гидроусилителей
Утверждать, что ГУР в стандартном исполнении крайне необходим нельзя. Он полезен только в определенных моментах. Конечно, он позволяет с успехом маневрировать в городских условия, но вот на открытой трасе при высокой скорости пользы от него вовсе нет. С возрастанием скорости перестаёшь «чувствовать» дорогу, что популярно особенно в зимний период.
Чтобы, как-то перекрыть изъян, было предпринято установить рулевую рейку с переменным придаточным отношением. Однако попытка была безуспешной спасла ситуацию электроника, которая выступила модификацией гидроусилителя. Она сочетает не только комфорт, но и информативность руля. Электрогидроусилитель руля (ЭГУР) служит по тому же принципу, отличия — прибавка электронного блока и исполнительного электроклапана.
Бачок гидроусилителя
Гидроусилитель руля: устройство и принцип работы
Чтобы понять, как устроена конструкция ГУРа, рассмотрим схему гидроусилителя рулевого управления, состоящую из таких частей, как:
- Силовой гидроцилиндр двойного действия помещен в рулевую часть, где стоит межу деталями привода и кузова. Соединен он с золотниковым управляющим узлом и гидроцилиндром. Основная заслуга — преобразование давления жидкости в перемещение поршня и штока, помогающих двигать колеса в необходимое направление.
- Насос прикрепляется на двигателе, а его привод от коленчатого вала осуществляется ременной передачей от шкива коленчатого вала. Требуется для сформирования давления масла. Более распространены конструкции лопастого типа, потому что у них хорошее КПД.
- Рабочая жидкость содержится в бачке, там же имеется фильтр, крышка с щупом для замера уровня. Функция масла смазывать трущиеся детали и передавать усилие от насоса к гидроцилиндру.
- Бачок, наполненный гидравликой, чтобы содержать его в чистоте внутри есть фильтр.
- Регулятор давления или распределитель – это прецизионный (высокоустойчивый) и простой по схеме узел. Являет собой редукционный клапан. Располагается на деталях рулевого привода или на одном валу с рулевым элементом. Его задача распределять гидравлику в нужную полость гидроцилиндра или назад в бак. Требуется для контроля частоты вращения коленвала мотора, чтобы тот не повышал допустимую норму давления гидравлической жидкости. Золотниковый распределитель – сложная деталь, состоящая из торсиона и золотникового клапана. Когда находящийся внутри золотник крутится, распределитель называют роторным, а если поступательно перемещается – осевым.
- Соединительные шланги высокого и низкого давления сводят между собой гидроцилиндр, насос и распределитель. Также по ним циркулирует гидравлическая жидкость из бака в насос и обратно, возвращаясь от распределителя. Там, где требуется создать взаимную подвижность узлов, применяют гибкие шланги.
Принцип работы у ГУР и ЭГУР схож
Принцип работы гидроусилителя руля как с осевым, так и с роторным распределителем, основан на перемещении золотника при перекладке рулевого колеса. Сначала насос формирует давление в узле рулевого управления. Если «баранку» крутят в одну из сторон, начинает двигаться золотник и закрывает одну из сливных магистралей, а рабочая жидкость под давлением идет в нужные полости гидроцилиндра. Гидравлика со штоком давит на поршень, а он двигает колеса.
Когда колеса поворачиваются, они направляют корпус распределителя в сторону движения золотника. А когда золотник принимает обездвиженное состояние начинают восстанавливать свое обычное положение корпуса распределителя. Из нагнетательной магистрали масло легко проходит в сливную. Далее, усилитель просто качает рабочую жидкость при помощи насоса по системе. В то же время колеса направлены прямо. Когда руль заканчивает крутиться, вся схема меняется и останавливается.
Если даже гидронасос сломался (к примеру, оборвался ремень привода) — это не влияет на управление транспортным средством. Потому что от рулевой системы усилие будет идти на корпус распределителя, а после на колеса с золотником. Через предпусковой клапан, гидравлика станет двигаться из одной полости в другую и не создавать препятствия, чем позволит поворачивать руль, только с напрягом. Схема рулевого управления с гидроусилителем наглядно демонстрирует всю суть системы.
Устройство насоса гидроусилителя руля
Во время поворота рулевого колеса в другую сторону распределитель подает масло в противоположные части гидроцилиндра, соответственно рулевая рейка идет в другую сторону и поворачивает колеса в нужную сторону. Что касается водителя, то он прилагает минимум усилия на поворот руля. Когда автомобиль находится без движения руль поворачивать также просто для этого необходимо чтобы был запущен мотор.
Если транспортное средство наезжает на препятствие, сила отталкивания пытается повернуть колеса. Но вместо этого они относительно золотника двигают корпус распределителя и перекрывают сливную магистраль. После чего гидравлическая жидкость поступает в полость цилиндра, и поршень посылает усилия на колеса, идущие в обратном направлении. Быстрая реакция приводит к тому, что колеса блокируются и не могут поворачивать. Из-за того, что ход золотника малый (где-то 1 мм), транспортное средство практически не меняет направление движения. ГУР ограждает руки водителя от столкновения со спицами руля, когда он во что-то врезается. Маленькие толчки все-таки ощущаются – это происходит из-за того, что над реактивными шайбами, повышается давление.
«Чувство дороги» — это обратная связь от управляемых колес через усилитель к рулю. Сообщает водителю, в каких условиях происходит поворот. Чувствуя силовое следящее действие управлять машиной можно при любой погоде. Поэтому в составе конструкции крепят реактивные шайбы, плунжеры или камеры. Одна из шайб при высоком давлении, пытается поместить золотник в исходную точку, от этого рулевое колесо работает «туже».
Расположение ГУРа
Устройство насоса гидроусилителя руля
Узел насоса лопастного типа делится на виды:
- Лопастный.
- Шестеренный.
Механизм насоса состоит из корпуса, ротора и уплотнительного кольца. Насос имеет клиноременный привод от шкива коленчатого вала. Шкив матируется в конце наружного вала, находящийся на шариковом и игольчатом подшипнике. Ротор располагается на шлицах вала, в его пазы свободно установлены лопасти. К корпусу насоса приделан распределительным диском и крышкой статор.
Внутренняя поверхность его корпуса имеет сложную форму. Лопасти устанавливаются в ротор, где параллельно его продольной оси предусмотрено несколько прорезей. Эти лопасти под давлением центробежной силы немного выходят из пазов и соприкасаясь, с внутренней поверхностью корпуса, создают замкнутые камеры.
Внутренняя поверхность корпуса устроена таким образом, что когда объём от вращения ротора снижается между ними сжимается масло. Если появляется отверстие, то гидравлическая жидкость стремительно выходит из лопастей. Процесс всасывания жидкости проходит наоборот. Сам по себе насос должен быть высокопроизводительным, чтобы обеспечивать повороты вала максимально быстро.
Запускается передачами от двигателя:
- Шестеренчатой.
- Ременной.
Рулевое управление с гидроусилителем, совмещенным с рулевым механизмом
Техническое обслуживание гидроусилителя
- Очень часто приводящий ремень становится причиной поломки гидроусилителя, поэтому нужно следить за уровнем его натяжения.
- Необходимо смотреть за уровнем масла в бачке, если его показатель ниже нормы, нужно долить. Нехватка масла приведет к тому, что насос выйдет из строя. Какая подходит гидравлическая жидкость больше всего нужно узнать из инструкции или в специализированном магазине.
- Один раз в год меняйте фильтрующий элемент в бачке.
- Сливать масло легко, нужно снять шлангу и при открытой крышке бачка жидкость выльется от действия атмосферного давления. Залив свежее масло необходимо при открытой крышке пару раз прокрутить руль в крайние положения, это нужно, чтобы лишний воздух покинул бачок.
- Учтите, что на ТС с гидроусилителем не стоит держать руль в крайнем поворотном положении свыше 5–6 секунд – перегреется гидравлическая жидкость.
- Кроме того, следует время от времени осуществлять замену масла, это объясняется загрязнениями, которые влияют на его свойства. При потере основных свойств жидкость способна повредить сальники рулевой рейки, а это приведет к сбою ГУРа.
- Регулярно проводите визуальный осмотр системы, так как может быть нарушена герметичность системы. Потеки гидравлики говорят, что требуется ремонт.
- Если гидронасос не работает, использовать машину долгое время нельзя – это приведет к износу распределителя и поломке элементов рулевого механизма.
Залив присадки в ГУР
Недостатки ГУР
- Нужно просматривать систему каждый день на наличие дефектов.
- Нанос работает от мотора, тем самым забирая у него часть мощности.
- Нет функций регулировки положений работы для разных условий.
Как видно минусов не так уж и много.
Интересное по теме:
загрузка…
Вконтакте
Одноклассники
Google+
Электрогидравлический усилитель руля Servotronic: устройство и принцип работы
Главным преимуществом электрического привода рулевого управления относительно гидроусилителя является отсутствие гидравлики, а значит насоса гидроцилиндра, шлангов. Это позволяет уменьшить массу усилителя рулевого управления и объем занимаемый управлением в подкапотном пространстве.
Известно, что ряд факторов приводит к уводу автомобиля от прямолинейного движения, например разное давление воздуха в шинах, разная степень износа протектора, боковой ветер, поперечный уклон дороги. Применение электромеханического усилителя позволяет активно поддерживать возврат управляемых колес в среднее положение. Эта функция называется «активной самоустановкой» колес. Благодаря ее действию водитель лучше чувствует среднее положение рулевого управления, она облегчает также вождение автомобиля по прямой при воздействии на него различных внешних сил.
Если при движении по прямой на автомобиль действует боковой ветер или поперечное усилие, вызываемое уклоном дорожного полотна, усилитель создает постоянный поддерживающий момент, который освобождает водителя от необходимости создавать реактивные усилия на рулевом колесе.
Общее расположение агрегатов рулевого управления с электроусилителем на примере автомобиля Opel Corsa показано на рисунке:
Рис. Общее расположение агрегатов рулевого управления с электроусилителем: 1 – электроусилитель; 2 – карданный вал рулевого управления; 3 – рейка привода рулевого управления
Электроусилитель может приводить вал рулевого управления на рулевой колонке, шестерню привода рейки или непосредственно саму рейку.
Рис. Электроусилитель рулевого управления на примере автомобиля Opel Corsa: 1 – электродвигатель; 2 – червяк; 3 – червячное колесо; 4 – скользящая муфта; 5 – потенциометр; 6 – кожух; 7 – рулевой вал; 8 – разъем датчика момента на рулевом валу ; 9 — разъем питания электродвигателя
Разрез электроусилителя рулевого управления с приводом рулевого управления на рулевой колонке показан на рисунке:
Рис. Разрез электроусилителя рулевого управления: 1 – трехфазный синхронный электродвигатель; 2 – якорь; 3 – обмотка статора; 4 – датчик положения якоря; 5 – червячное колесо; 6 – рулевой вал; 7 – червяк
Электроусилитель через червячную передачу связан с валом рулевого управления. В зависимости от полярности напряжения питания электродвигатель вращается в ту или иную сторону, помогая водителю поворачивать колеса. Крутящий момент величиной силы тока, определяемой блоком управления действующим согласно заложенной в него программе и сигналам, поступающим от соответствующих датчиков.
Вал электродвигателя, при подаче на двигатель напряжения помогает поворачивать вал привода рулевого колеса через червяк и червячное колесо. Для поддержания постоянной обратной связи с дорогой входной и выходной валы электроусилителя соединены друг с другом через торсион. Приложение усилия к рулевому управлению как со стороны водителя, так и со стороны дороги приводит к закручиванию торсиона до 3-х градусов и изменению взаимной ориентации входного и выходного валов. Это служит сигналом для включения в работу электроусилителя. В зависимости от угла поворота рулевого колеса и скорости автомобиля электродвигатель подкручивает выходной вал, снижая усилие. Работает электродвигатель и при обратном ходе, он помогает возвращать колеса автомобиля и рулевое колесо в первоначальное положение. Торсион при поворотах всегда остается немного скрученным, гарантируя тем самым на руле то усилие, которое необходимо водителю, чтобы чувствовать дорогу.
Один из датчиков находится на торсионе, соединяющем половинки разрезанного рулевого вала, и следит за его закручиванием. С ростом усилия на руле сильнее закручивается торсион – больший ток идет на электромотор усилителя, что соответственно увеличивает помощь водителю.
Второй датчик следит за скоростью автомобиля. Чем она меньше, тем эффективнее помощь в повороте рулевого управления и наоборот, а после 75 км/ч усилитель вообще выключается чтобы не создавать дополнительного сопротивления, редуктор и электромотор разъединяются.
Третий датчик контролирует частоту вращения коленчатого вала двигателя и следит, чтобы усилитель работал только одновременно с ним. Это делается в целях экономии электроэнергии, потому что электроусилитель может потреблять до 105 А.
Производитель автомобилей Ауди предлагают систему реечного электроусилителя с двумя шестернями.
Рис. Схема реечного электроусилителя с двумя шестернями: 1 – датчик момента на рулевом колесе; 2 – электронный блок управления; 3 – электродвигатель усилителя; 4 – шестерня усилителя; 5 – рейка; 6 – датчик угла поворота рулевого колеса; 7 – торсион вала рулевого управления; 8 – шестерня рулевого механизма
Усилитель действует на рейку рулевого механизма через шестерню 3, которая установлена параллельно с основной шестерней рулевого механизма 2. Шестерня усилителя 3 приводится от электродвигателя 4. Передаваемый на шестерню 2 рулевого механизма крутящий момент измеряется датчиком момента 1. Величина развиваемого усилителем крутящего момента устанавливается электронным блоком управления 5 в зависимости от момента на рулевом колесе, скорости автомобиля, угла поворота колес, скорости поворота рулевого вала и других вводимых в него данных.
Электродвигатель и редуктор размещены в общем алюминиевом корпусе 2. На конце вала двигателя нарезан червяк 3.
Рис. Червячная передача привода шестерни усилителя: 1 – электродвигатель; 2 – корпус; 3 – червяк; 4 – вал привода; 5 – демпфер
Червячная передача служит для привода шестерни усилителя. Между червячным колесом и шестерней установлен демпфер 5, который исключает резкое нарастание усилия на рейке при включении усилителя. Положение (угол поворота) ротора электродвигателя определяется с помощью датчика поворота 6. Этот датчик расположен под возвратным и скользящим кольцами подушки безопасности. Он установлен на рулевой колонке между подрулевыми переключателями и рулевым колесом. Датчик генерирует сигнал, соответствующий углу поворота рулевого колеса.
Основными деталями датчика угла поворота рулевого колеса являются кодирующий диск с двумя кольцами и фотоэлектрические пары, каждая из которых содержит источник света и фотоэлемент. На кодирующем диске предусмотрены два кольца: внешнее кольцо 1 с шестью фотоэлектрическими парами, которое служит для определения абсолютных значений угла поворота рулевого колеса, и внутреннее кольцо 2 – для определения приращений этого угла. Кольцо приращений разделено на 5 сегментов по 72°. Оно используется в сочетании с одной фотоэлектрической парой. В пределах каждого из сегментов кольцо имеет несколько вырезов. Чередование вырезов в пределах одного сегмента не изменяется, а в отдельных сегментах оно отличается. Благодаря этому осуществляется кодирование сегментов.
Рис. Схема датчика угла поворота рулевого колеса: 1 – внешнее кольцо абсолютных значений; 2 – внутреннее кольцо приращений; 3 – фотоэлектрическая пара.
Датчик угла поворота рулевого колеса позволяет отсчитывать его в пределах до 1044°. Отсчет угла производится путем суммирования числа градусов. При переходе через метку, соответствующую 360°, датчик регистрирует завершение поворота на один полный оборот. Конструкцией рулевого механизма предусмотрена возможность поворота рулевого колеса на 2,76 оборота.
На рулевом колесе установлен датчик момента 3.
Рис. Датчик момента на рулевом колесе: 1 – рулевой вал; 2 – магнитное кольцо; 3 – чувствительный элемент датчика; 4 – вал шестерня; 5 – витой кабель; 6 – торсион
Действие этого датчика основано на магниторезистивном эффекте. На рулевом вале 1 установлено магнитное кольцо 2, которое жестко связано с верхней частью торсиона 6. Чувствительный элемент 3 датчика соединен с валом шестерни рулевого механизма 4 и связан таким образом с нижней частью торсиона. Сигнал снимается с датчика через витой кабель 5. Торсион закручивается точно в соответствии с усилиями, прилагаемыми к рулевому валу. При этом магнитное кольцо 2 перемещается относительно чувствительного элемента 3 датчика. В результате действия магниторезистивного эффекта изменяется сопротивление чувствительного элемента, величина которого определяется блоком управления.
Если системой управления обнаружен дефект датчика, она производит «мягкое» отключение усилителя. При этом усилитель не отключается полностью, а переводится на режим управления по резервному сигналу, который образуется в блоке управления из сигналов угла поворота рулевого вала и частоты вращения ротора двигателя усилителя.
Электрогидроусилитель руля: принцип работы
Рабочая жидкость наполняет резервуар, после переходит в насос ГУР по соединительному шлангу. При повороте руля блок управления подаёт питание на электродвигатель, который включается и начинает вращать вал насоса ГУРа с частотой, зависящей от скорости автомобиля и усилия приложенного к рулю. Так же питание подаётся на соответствующий электроклапан, в зависимости от направления поворота. Насос создаёт давление жидкости и передает ее через соответствующий клапан в гидроцилиндр. Гидроцилиндр энергией рабочей жидкости образует силу, пропорциональную давлению жидкости, которая движет поршнем и штоком, далее они повернут нужным образом колеса системой рычагов.
ГУРы и ЭУРы: враги или коллеги
Как и «гидрач» (ГУР), ЭУР (электроусилитель) создан для того, чтобы создавать дополнительное усилие на рулевой механизм, тем самым облегчая для водителя процесс управления автомобилем.
О первом типе усилителей уже есть публикация в нашем блоге, напомним лишь, что его главным элементом является гидроцилиндр, на который действует специальная рабочая жидкость, накачиваемая насосом.
Гидроусилители имеют уже достаточно долгую историю, чего не скажешь об электроусилителях, которые появились на арене автопрома сравнительно недавно. Несмотря на это, по мнению экспертов, ЭУРы через пару лет полностью вытеснят из недр легковых машин «гидрачи».
Принцип действия ЭУР
Электрический узел, чья задача – облегчить вращение рулевого колеса, состоит из следующих элементов:
- электродвигатель асинхронного типа;
- механический привод, соединяющий его с рулевым механизмом авто;
- собственный блок управления с датчиками.
В малолитражках, где требуется небольшое усилие для поворота колес, блок ЭУР небольших размеров устанавливается под приборной панелью. В автомобилях среднего класса электроусилитель руля под торпедо уже не поместится, а потому выносится в подкапотное пространство. В обоих случаях привод электродвигателя связан с валом рулевой колонки.
При управлении легковыми автомобилями больших размеров и тяжелыми внедорожниками нужно развивать большее усилие, чтобы поворачивать колеса. Поэтому в них задействован привод ЭУР, работающий напрямую с рулевой рейкой. Независимо от места расположения электродвигателя и его подключения к механизму, принцип работы электроусилителя руля остается неизменным. Он заключается в автоматическом включении электропривода и передаче дополнительного усилия на механизм при повороте водителем рулевого колеса. Величина крутящего момента, создаваемого усилителем, зависит от трех параметров:
- Угла поворота. Он измеряется датчиком, встроенным в рулевую колонку.
- Усилия на руле. Определяется специальным датчиком в виде скручивающегося торсиона, имеющего механическую связь с валом. Чем сильнее скручивается торсион, тем большее усилие развивает двигатель.
- Скорости движения. Эта информация поступает от контроллера, а он ее берет от датчика скорости.
Основываясь на этих показаниях, электронный блок управляет электроприводом в соответствии с ситуацией. При малой скорости движения, сильном скручивании торсиона и большом угле поворота (режим парковки или разворота) агрегат усилителя выдает максимальную мощность. Во время движения по прямой особой помощи водителю не требуется, потому ЭУР подключается минимально.
Отличия от других видов усилителей
Как отмечалось ранее, в отличие от обычного гидроусилителя руля, ЭГУР Servotronic имеет в составе электромотор, приводящий в движение насос (либо другое исполнительное устройство – электромагнитный клапан), а также электронную систему управления. Данные конструктивные отличия позволяют электрогидравлическому усилителю регулировать усилие в зависимости от скорости машины. Этим обеспечивается комфортное и безопасное управление автомобилем на любой скорости.
Отдельно отметим легкость маневрирования на малых скоростях, что недоступно обычному ГУР. На больших скоростях уровень усиления уменьшается, что позволяет водителю управлять автомобилем более точно.
Устройство и принцип работы ЭУР
Как же работает электроусилитель руля с точки зрения безопасности? Устроен электроусилитель рулевого управления гораздо проще, нежели ГУР. У него нет никаких расходных материалов в виде жидкостей. Отсутствуют множество подвижных соединений и уплотнений (критические места для поломки). Именно поэтому сейчас идет массовый отказ от стареньких гидроусилителей. Даже отечественные производители ВАЗ перешли на эту технологию.
Технические характеристики электроусилителя:
- напряжения питания (номинальное) – 12 В;
- максимальный компенсирующий момент – 35 Нм;
- максимальный ток потребления – 50 А;
- ток потребления (усилие на рулевом колесе приложено, выходной вал усилителя заблокирован) – не более 15 А.
Его появление помогло автопроизводителям реализовать ряд новых функций, таких как:
- повышение курсовой устойчивости;
- автоматическая парковка;
- соблюдение рядности движения.
Недостатки ЭУР
На данный момент пока еще невозможно использовать ЭУР на тяжелых грузовиках, требующих большого усилия при вращении рулевого колеса. Для них гидроусилители руля остаются единственным и надёжным вариантом.
Еще следует отметить боязнь влаги. Вода и конденсат могут вывести из строя предохранители и электродвигатель. К недостаткам можно отнести все ещё высокую стоимость этой системы. В то же время она становится всё более популярной и распространенной.
Преимущества устройства
- Надежность.
- Возможность реализации автоматического управления автомобилем.
- Простота обслуживания и бесшумная работа.
- Экологическая и технологичность безопасность.
- Возможность управления транспортным средством в случае выхода системы из строя.
- Обеспечение легкости и плавности рулевого управления.
- Обеспечение соответствия между углами поворота управляемых колес и руля.
- Обеспечение пропорциональности между силами сопротивления повороту колес и усилием на рулевом колесе.
Электрогидроусилитель руля рабочие параметры насоса:
Допустимый зазор между составляющими частями — 0,005-0,001 мм. Отклонение от допустимого значения влечет за собой падение давления жидкости на холостом ходу и как следствие ощущение тугого руля и визг на поворотах. В зависимости от автомобиля рабочее давление — 150 Бар При эксплуатации ЭГУ руля возможны неисправности, при которых его эксплуатация невозможна. При включении зажигания блок управления производит тестирование электрической части. Если при этом обнаруживается неисправность, то происходит отключение ЭУР. При неисправности же насоса отключение не происходит, а ЭУР может работать частично, так как давление будет недостаточным.
Устройство электроусилителя руля: где искать и как работает
Устройство электроусилителя руля довольно простое, его центровым элементом выступает электродвигатель, как правило, асинхронного типа. В зависимости от того, где установлен моторчик, различают такие схемы этого узла:
- с расположением на валу рулевого колеса;
- с расположением на рейке рулевого механизма.
Первый вариант характерен для небольших автомобилей, например для малолитражек и прочих компактных легковушек. Им и так не нужно большое усилие на руле, поэтому усилитель имеет компактные размеры и может находиться прямо под баранкой в салоне.
С более массивными авто такой фокус не пройдёт, и у них ЭУР приводит в движение рулевую рейку при помощи дополнительной шестерни или шарико-винтового механизма.
Принцип работы электроусилителя основывается на слаженном взаимодействии трёх компонентов:
- входных датчиков;
- электронного блока управления;
- исполнительного устройства.
Для того чтобы ЭУР работал правильно ему нужно знать как и куда поворачивается руль, какая скорость у машины и в каком режиме функционирует двигатель.
Этой информацией блок управления снабжают соответствующие датчики. В зависимости от полученных данных, он выдаёт команду исполнительному устройству коим и является электромотор ЭУР.
Кстати, с появлением электроусилителей у инженеров просто таки открылось второе дыхание. Так, к примеру, эти устройства позволили внедрить системы автоматической парковки, расширить функционал систем курсовой устойчивости, аварийного управления, удержания полосы движения авто и прочие новомодные интеллектуальные технологии.
О дополнительных функциях электроусилителей
Устройство электроусилителя руля задумано таким образом, чтобы при необходимости электродвигатель мог поворачивать колеса автомобиля как одновременно с водителем, так и самостоятельно. Это дает простор для реализации дополнительных функций:
- автоматическое «подруливание» с целью удержания машины на прямой траектории;
- возврат колес в прямое положение после совершения маневра, ЭУР может это делать, когда водитель отпускает баранку после выполнения поворота;
- создание «тяжести» на рулевом колесе при разных режимах движения, чтобы сделать руль информативнее;
- выполнять автоматическую парковку без участия водителя.
В то же время ЭУР не препятствует прямому управлению колесами при заглушенном двигателе или поломке, механическая связь между ними и баранкой сохраняется.
Устройство и основные компоненты
Основные компоненты ЭГУР
ЭГУР Servotronic имеет в своем составе три основных компонента: электронную систему управления, насосный узел и гидравлический узел управления.
Насосный узел электрогидравлического усилителя состоит из бачка для рабочей жидкости, гидравлического насоса и электромотора для него. На этот компонент ставят электронный блок управления (ЭБУ). Отметим, что электрический насос бывает двух типов: шестеренчатый и лопастной. Простотой и надежностью отличается первый тип насоса.
Гидравлический узел управления включает в свой состав силовой цилиндр с поршнем и торсион (стержень, работающий на скручивание) с распределительной гильзой и золотником. Этот компонент интегрирован с рулевым механизмом. Гидравлический узел – это исполнительный механизм усилителя.
Читайте также: Устройство и принцип работы рулевой рейки
Электронная система управления Servotronic:
- Входные датчики – датчик скорости, датчик крутящего момента на рулевом колесе. Если автомобиль оборудован ESP, то используется датчик угла поворота руля. Система также анализирует данные о частоте вращения коленвала двигателя.
- Электронный блок управления. ЭБУ обрабатывает сигналы от сенсоров, а после их анализа посылает команду исполнительному устройству.
- Исполнительное устройство. В зависимости от вида электрогидравлического усилителя исполнительным устройством может быть электромотор насоса либо электромагнитный клапан в гидравлической системе. Если установлен электродвигатель, то производительность усилителя зависит от мощности мотора. Если же установлен электромагнитный клапан, то производительность системы зависит от размера проходного сечения.
Схемы рулевого управления
Существует 3 схемы установки электроусилителя. В независимости от схемы общая конструкция электромеханического усилителя состоит из электродвигателя, механической передачи, двух датчиков и двух шестерней или параллельного привода.
- ЭУР устанавливается на рулевую колонку. Это самый компактный вариант, при котором для поворота руля не требуется больших усилий. Сам электромотор и механическая передача помещаются под рулевым колесом. Огромным плюсом является нахождение в салоне, а не под капотом, тут устройство защищено от пыли и грязи, а это в свою очередь продлевает срок службы. Так же в случае выхода из строя устройства, Вам будет легко разобраться в принципе установки и поменять его своими руками, что сэкономит деньги. Данный вид крепления усилителя используют преимущественно на малом классе авто.
- Установка на рулевую рейку. Так устанавливают усилитель преимущественно на микроавтобусы и внедорожники. Здесь требуется уже больше усилия, которое передается через шестерню. Ведь чем больше автомобиль, тем больше он весит и тем большее усилие нужно для поворота.
- Устанавка на шариковинтовой механизм, где через ременную передачу усилие от электродвигателя передается на рейку. Данный способ обеспечивает наибольшее усилие электродвигателя при повороте. Так устанавливают электроусилитель руля на тягачи и автобусы.
Какой бы не был механизм установки электроусилителя руля, бывают сбои в блоке управление, при выходе из строя, он не блокирует поворот руля. И автомобиль можно спокойно отогнать в сервис, где его поменяют или отрегулируют.
Основные режимы
Электроусилитель руля имеет два основных режима. Они характеризуются скоростью движения автомобиля. В первом режиме при движении на малой скорости, например, во время парковки, когда необходима большая маневренность и руль приходится выворачивать до крайних положений то влево, то вправо, ЭУР прикладывает максимальное усилие к рулевому механизму, обеспечивая «легких руль». В этом режиме вращать рулевое колесо можно одним пальцем.
Напротив, при движении на больших скоростях руль становится «жестким», создавая эффект возврата колес в среднее положение. Это сделано в целях повышения безопасности движения.
Также есть режимы удержания автомобиля на дороге при сильном боковом ветре, при движении на колесах, имеющую разную степень накачки. Эти режимы достигаются благодаря специальным настройкам блока управления. На автомобилях бизнес и премиум класса наличие ЭУР позволяет реализовать опцию автоматической парковки.
Неисправность EPS
Пиктограмма неисправности EPS
Если на панели приборов загорелась контрольная лампа (значок, на котором находится руль с восклицательным знаком), то это говорит о неисправности EPS. Появление ошибки говорит о том, что электроусилитель не проходит самодиагностику при включении зажигания. Причиной неисправности могут быть множество факторов, например выход из строя какого-нибудь из датчиков, входящих в систему управления EPS. Хотя управлять автомобилем можно и без электроусилителя, но делать этого не стоит. Лучше обратится к специалистам.
Динамика мозговой электрической активности, связанная с обучением, связанная с последующим воздействием ассоциаций выученного действия и результата
Аннотация
Целенаправленное поведение основывается на интеграции ожидаемых результатов в планирование действий на основе полученных знаний о текущих непредвиденных обстоятельствах между поведенческими реакциями (R) и желаемые результаты (O) при определенных условиях стимула (S). Согласно идеомоторной теории, двунаправленные ассоциации R-O являются неотъемлемой частью этой структуры знания.Предыдущие исследования ЭЭГ выявили маркеры нервной активности, связанные с участием таких ассоциаций, но начальный процесс приобретения еще не охарактеризован. Таким образом, в настоящем исследовании изучалась динамика электрической активности мозга во время быстрого приобретения новых двунаправленных ассоциаций R-O во время обучения S-R. В рамках исследования мы изучали динамику активности с блокировкой ответов и стимулов, чтобы определить маркеры, связанные с прямой и обратной активацией двунаправленных ассоциаций R-O, поскольку они все больше усиливались в условиях принудительного выбора.Мы обнаружили, что пост-ответная передняя негативность после слуховых исходов все больше ослаблялась в зависимости от приобретенной силы ассоциации. Это предполагает, что ранее описанные эффекты сенсорного ослабления, вызванные действием, в условиях интенсивного обучения свободному выбору могут быть установлены в течение нескольких повторений конкретных пар R-O в условиях принудительного выбора. Кроме того, мы наблюдали еще более быстрое развитие постреагирующей, но дорезультатной, фронто-центральной позитивности, которая была снижена для учащихся с высоким R-O, что может указывать на быстрое развертывание подготовительного внимания для достижения предсказуемых результатов.Наконец, мы определили связанную с обучением модуляцию активности с блокировкой стимула в диапазоне зрительной задержки P1-N1, которая может отражать мультисенсорную интеграцию воспринимаемого предшествующего зрительного стимула и ожидаемого слухового результата.
Ключевые слова: намерение, прогнозирование, идеомоторное обучение, инструментальное обучение, перцептивное обучение, сенсорное ослабление, мультисенсорная интеграция
Введение
Поведение считается целевым, когда субъект интегрирует информацию об ожидаемом результате в текущее планирование действий (Дикинсон и Баллейн, 1994).Интеграция результатов требует предварительного приобретения знаний о текущих непредвиденных обстоятельствах между поведенческими реакциями (R) и их результатами (O) при определенных предшествующих условиях стимула (S). В частности, успешное приобретение новых представлений на случай непредвиденных обстоятельств SRO делает возможным выбор действия через цепочку ассоциаций SO, OR в качестве одного из возможных путей к целенаправленному действию (Trapold, 1970; Urcuioli, 2005; Balleine and Ostlund, 2007; de Wit and Dickinson, 2009). ). Согласно идеомоторной теории, это возможно, поскольку случайность между R и последующим O кодируется как двунаправленная ассоциация, где «прямые» ассоциации R-O и «обратные R-O» (т.е., O-R) ассоциации рассматриваются как две стороны одной медали (Greenwald, 1970b; Urcuioli, 2005; de Wit, Dickinson, 2009; Shin, Proctor, 2012; Waszak et al., 2012). Следовательно, конкретное представление результата может быть активировано путем планирования определенного действия (через прямой R-O), тогда как конкретное представление действия может быть активировано путем восприятия или ожидания определенного результата (через обратный R-O).
Настоящее исследование направлено на характеристику связанных с обучением изменений нейронной активности в испытаниях , связанных с начальным формированием двунаправленных ассоциаций R-O в контексте принудительного выбора, когда действия запускаются предшествующим стимулом.Более того, используя превосходное временное разрешение сигнала ЭЭГ, мы могли оценить изменения активности, связанные с обучением, на разных фазах в рамках испытания . С одной стороны, это включало связанные с обучением модуляции потенциалов, связанных с событием после ответа (ERP), связанные с активацией вперед двунаправленных ассоциаций R-O и последующим измененным восприятием прогнозируемых результатов. С другой стороны, это включало связанные с обучением модуляции предответных ERP, связанных с обратной активацией двунаправленных ассоциаций R-O через вызванное стимулом ожидание будущих результатов.
По-разному предыдущие исследования ERP идентифицировали нейронные маркеры, отражающие участие двунаправленных ассоциаций R-O, но, насколько нам известно, ни одно из этих исследований не изучало процессы прямой или обратной активации R-O по мере их развития в начальных испытаниях обучения. Вместо этого в предыдущих исследованиях изучались маркеры ERP, отражающие, как уже хорошо изученные ассоциации R-O влияют на выбор ответа или обработку результатов после ответа. В связи с этим в предыдущих исследованиях поведения и ERP обычно использовались экспериментальные настройки, в которых ассоциации R-O были получены и / или исследованы в условиях свободного выбора.Предположительно, этот выбор дизайна часто следовал рассуждениям о том, что условия свободного выбора будут побуждать субъектов к принятию основанного на намерении режима действия, включающего ассоциации РО, тогда как условия принудительного выбора будут вызывать основанный на стимулах или привычный режим действия, преимущественно опирающийся на ассоциации СО (Herwig et al. al., 2007; Krieghoff et al., 2011; Pfister et al., 2011). Однако другие недавние исследования показывают, что условия принудительного выбора вредны для интеграции R-O только в том случае, если обширная практика S-R-O допускает значительный уровень привыкания, то есть полагаться на ассоциации S-R.Эти исследования показали, что ассоциации RO усваиваются и влияют на последующее поведение в экспериментальных условиях с полностью принудительным выбором с фазами усвоения, включающими менее 10 повторений конкретных комбинаций SRO (Wolfensteller and Ruge, 2011, 2014; Ruge et al., 2012; Ruge и Wolfensteller, 2013). Следовательно, в этих обстоятельствах субъекты, кажется, придерживаются режима действия, основанного на намерениях, поскольку существенное привыкание не могло развиться в рамках этого ограниченного объема практики (Wolfensteller and Ruge, 2012).Соответственно, мы предположили, что мы должны иметь возможность наблюдать – в условиях принудительного выбора – в течение первых нескольких испытаний обучения S-R-O появление маркеров ERP, связанных с R-O, подобных тем, которые были ранее идентифицированы после длительных периодов обучения R-O в условиях свободного выбора.
Наиболее изученный маркер ERP процессов, связанных с RO, был идентифицирован в классе исследований, в которых изучались так называемые эффекты сенсорного ослабления, вызванные действием, как проявление модуляций ERP после ответа , связанных с прямой активацией двунаправленных Ассоциации РО (Waszak et al., 2012). Эффект сенсорного ослабления, вызванный действием, означает измененное восприятие стимулов, которые предсказуемо запускаются собственными действиями (т. Е. Результатами действия). В частности, результаты действия воспринимаются как ослабленные и сдвинутые во времени по сравнению со стимулами, которые не предсказываются или предсказываются другими стимулами, а не собственными действиями (Von Holst and Mittelstaedt, 1950; Weiskrantz et al., 1971; Blakemore et al., 1998). ; Haggard et al., 2002). Это широко распространенное явление, которое оценивалось не только поведенчески, но и нейрофизиологически с использованием различных методик (Schafer and Marcus, 1973; McCarthy and Donchin, 1976; Martikainen et al., 2005; Алиу и др., 2009; Резник и др., 2014; Timm et al., 2014), включая ряд недавних исследований ЭЭГ (Lange, 2011; Desantis et al., 2012; Hughes et al., 2013a, b; SanMiguel et al., 2013; Mifsud et al., 2016; Тимм и др., 2016). Когда исходы звучат так же, как в большинстве предыдущих исследований, типичным результатом является уменьшение вызванных исходом амплитуд ERP в пределах латентного диапазона компонентов N1 и P2 на лобно-центральных электродах.
Другой класс исследований изучал обратную активацию двунаправленных ассоциаций R-O перед ответом вместо прямой активации тех же ассоциаций, вызванной действием.Одной из выдающихся парадигм, которая использовалась для изучения этого типа процессов в поведенческих исследованиях, является парадигма прайминга реакции, индуцированной результатом, в которой восприятие ранее изученных результатов действий смещает текущий выбор реакции в сторону действия, которое привело к этому результату в предыдущем обучении. фаза (Greenwald, 1970a; Hommel, 1996; Elsner, Hommel, 2001). Другая поведенческая парадигма выявила аналогичные ошибки выбора ответа из-за предреагирования ожидания результатов и последующей обратной активации двунаправленных ассоциаций R-O (Kunde, 2001; Pfister et al., 2010). Более того, было высказано предположение, что условия свободного выбора по сравнению с условиями принудительного выбора на основе стимулов связаны с более сильной упреждающей обратной активацией двунаправленных ассоциаций R-O (Krieghoff et al., 2011). Исследования ERP показали, что это отражается в более выраженном компоненте, подобном потенциалу готовности, в качестве общего маркера планирования действий, в большей степени основанного на намерениях (Waszak et al., 2005; Krieghoff et al., 2011). Мы предположили, что мы можем наблюдать аналогичное усиление ERP даже в условиях принудительного выбора, поскольку выбор ответа на основе стимулов по-прежнему будет преднамеренным по своей природе из-за слабой привыкания в пределах ограниченного числа всего лишь восьми повторений SRO (Wolfensteller and Ruge, 2012; Ruge and Wolfensteller , 2013).
Мы использовали экспериментальный план, основанный на парадигме дифференциальных исходов (Trapold, 1970; Colwill and Rescorla, 1985; Elsner and Hommel, 2001; Noonan et al., 2011), где результаты дифференциальной слуховой реакции были представлены во время визуальной визуализации на основе инструкций. моторное обучение (Wolfensteller, Ruge, 2014; Ruge, Wolfensteller, 2015). В частности, каждая четкая связь между визуальным стимулом и мануальной реакцией предсказуемо сопровождалась отдельным слуховым результатом. Чтобы получить достаточно данных для первоначальных обучающих испытаний, каждый испытуемый работал над 10 различными блокированными обучающими эпизодами, каждый из которых содержал новый и уникальный набор визуальных стимулов и слуховых результатов.В отличие от аналогичных предыдущих исследований, чтобы минимизировать перекрестные помехи между обучающими блоками, мы использовали в общей сложности 40 различных звуковых исходов, которые были легко различимыми естественными звуками по сравнению с обычно используемыми простыми синусоидальными тонами. Каждый обучающий эпизод включал восемь обучающих испытаний для каждой из четырех уникальных троек S-R-O. Из предыдущих поведенческих исследований известно, что восьми повторений конкретных пар R-O достаточно для установления устойчивых двунаправленных ассоциаций R-O, оцениваемых с помощью эффектов совместимости O-R после обучения (Wolfensteller and Ruge, 2011, 2014; Ruge et al., 2012). Этот поведенческий индекс использует инициируемые результатом эффекты прайминга реакции, которые можно наблюдать, когда ранее усвоенный результат действия впоследствии становится императивным стимулом, требующим либо реакции, которая произвела этот результат в предыдущей фазе обучения (ИЛИ совместима), либо реакции, которая произвела другой исход (ИЛИ несовместимый). Такие эффекты совместимости OR, выражающиеся в увеличении времени отклика и увеличении количества ошибок в несовместимых испытаниях по сравнению с совместимыми испытаниями, обычно наблюдаются и указывают на то, что восприятие результата автоматически стимулирует действие, которое оно было ранее произведено Greenwald (1970a), Hommel (1996). ) и Элснер и Хоммель (2001).Мы использовали этот эффект совместимости O-R после обучения в качестве прокси для силы двунаправленной ассоциации R-O, полученной во время предыдущей фазы обучения S-R-O. Наше обоснование состояло в том, чтобы использовать этот поведенческий индекс в корреляционном анализе для выявления коррелированных модуляций ERP, связанных с обучением, которые конкретно связаны с возрастающим участием двунаправленных ассоциаций R-O на предшествующей фазе обучения S-R-O.
Чтобы оценить, насколько быстро ERP начнет модулироваться за счет интеграции двунаправленных ассоциаций R-O, мы проанализировали связанную с обучением динамику активации ERP в двух временных масштабах.Во-первых, очень быстрое обучение оценивалось от первого до второго повторения определенных звеньев R-O в обучающих блоках. Это сравнение включало первые повторные испытания (определяемые как первое появление определенных ссылок R-O), которые были особенными в том смысле, что конкретные ссылки R-O были полностью неизвестны до тех пор, пока исходные звуки не воспроизводились в первый раз после правильного выполнения ответа. Начиная со вторых повторных испытаний, связи R-O теоретически могут быть известны заранее. Во-вторых, обучение в более медленном (но все же относительно быстром) масштабе времени оценивалось от второго до последнего восьмого повторения конкретных связей R-O в обучающих блоках.Это более медленное сравнение шкалы времени, следовательно, включало повторения R-O, которые были качественно очень похожи, и, как ожидалось, процессы обучения, связанные с R-O, постепенно менялись от повторений.
Подводя итог, на основе предыдущей литературы по ERP, описанной выше, мы выдвинули гипотезу о связанных с RO-обучением модуляциях двух компонентов ERP с блокировкой отклика, включая увеличивающееся затухание после ответа вызванных звуком ERP и увеличивающееся усиление до ответа компонент готовности, подобный потенциалу.Кроме того, нас интересовала модуляция ERP с привязкой к стимулу из-за особого характера настоящего исследования, в котором выбор действия зависел от конкретного предшествующего стимула S в отличие от типичной процедуры свободного выбора, использованной в предыдущих исследованиях. Следовательно, предполагалось, что упреждающая обратная активация двунаправленных ассоциаций R-O запускается предшествующим стимулом через цепочку ассоциаций S-O, O-R, которая должна наиболее четко отражаться в связанных с обучением модуляциях ERP с блокировкой стимула, а не с блокировкой ответа.
Материалы и методы
Субъекты
В этом исследовании приняли участие тридцать пять субъектов. Три субъекта были исключены из-за недостаточного качества исходных данных, а два дополнительных субъекта были исключены из-за чрезмерного количества ошибок, превышающих 20% в испытаниях неуправляемой реализации (повторения SRO 4-8). Средний возраст 30 участников составил 23,0 года, от 18 до 33 лет, из которых 17 были женщинами и 13 мужчинами. Все испытуемые дали письменное информированное согласие в соответствии с Хельсинкской декларацией и получили 8 евро за час или получили зачет курса.В соответствии с руководящими принципами ответственного финансирующего агентства (http://www.dfg.de/foerderung/faq/geistes_sozialwissenschaften/) это исследование не требовало официального утверждения наблюдательным советом учреждения, поскольку исследование не было связано с риском физического или эмоционального вреда и не предполагали клинического вмешательства или обследования, а также не касались несовершеннолетних или пожилых участников.
Экспериментальная процедура
S-R-O Этап сбора данных
Инструкции были доставлены с помощью процедуры «управляемой реализации», в которой инструкция встроена в первые три испытания поведенческой реализации, которые также включали представление различных результатов после правильных ответов (см. Рисунки).
Схематическое изображение фазы получения S-R-O (A, B) и фазы теста O-R (C) для примерного набора визуальных предшествующих стимулов и слуховых дифференциальных результатов. В ходе эксперимента испытуемые должны были изучить 10 таких сопоставлений S-R-O, каждое из которых содержало новый и отличный набор из четырех визуальных стимулов и четырех слуховых исходов. (A) Примерное отображение визуальных стимулов, инструкций, ответов и слуховых исходов. (B) Новые сопоставления S-R-O были изучены в ходе испытаний управляемой реализации с помощью явных инструкций, представленных для первых трех повторений каждой отдельной тройки S-R-O (SRO-rep 1–3).Начиная с SRO-повторения 4 и далее, подсказки инструкций были опущены, и правильный ответ должен был быть извлечен из памяти в испытаниях неуправляемой реализации (SRO-rep 4-8). (C) Четыре звуковых стимула, которые были произведены правильными ответами на предшествующие визуальные стимулы в фазе обучения, служили предшествующими стимулами в тестовой фазе. Необходимые ответы на эти стимулы могут быть одинаковыми (совместимыми) или разными (несовместимыми) в зависимости от реакции, которая производила звук раньше.Данные фазы тестирования использовались исключительно для вычисления размера эффекта совместимости поведенческих O-R, который коррелировал с изменениями электрической активности мозга, связанными с обучением, во время предшествующей фазы обучения S-R-O.
Стимулы представляли собой четыре абстрактных визуальных шаблона, которые различались для каждого блока. На этапе сбора данных каждое испытание начиналось с представления визуального стимула S в центре экрана в течение 500 мс. Каждый стимул предъявлялся не менее восьми раз, и для каждого ошибочного ответа происходило дополнительное предъявление.Стимулы предъявлялись в случайном порядке, за исключением испытаний после ошибок, в которых тот же самый стимул предъявлялся снова. Было проведено 12 экспериментов с управляемой реализацией (три повторения четырех разных стимулов, правильные ответы и результаты). Через 250 мс после начала S был отображен дополнительный командный стимул (IS), который оставался на экране до получения ответа или до тайм-аута через 1750 мс. IS представлял собой желтый квадрат, выделяющий одно из четырех постоянно отображаемых пустых квадратов. Ручные ответы (левый средний палец, левый указательный палец, правый указательный палец и правый средний палец) были сопоставлены пространственно совместимым образом с положением IS.После перерыва в 150 мс за правильными ответами следовал натуралистический звуковой эффект, который длился 500 мс и был разным для каждого S. В испытаниях неуправляемой реализации IS был пропущен еще для пяти правильных повторений четырех различных троек S-R-O. Таким образом, начиная с четвертого повторения S-R-O (SRO-rep), правильный ответ должен был быть извлечен из памяти, поскольку он больше не указывался IS. В случае ошибочных ответов отображалась обратная связь об ошибке, и испытание немедленно повторялось.Эксперимент включал 10 различных обучающих блоков S-R-O, каждый с новыми визуальными стимулами и новыми звуками результата. Интервал между испытаниями (ITI) был выбран случайным образом из распределения, включающего длительность интервалов 800 мс (24 испытания на блок), 2350 мс (5 испытаний на блок) и 4700 мс (3 испытания на блок). Анализ связанных с обучением изменений в поведении и активации мозга был основан на правильных испытаниях в диапазоне от SRO-rep 1 до SRO-rep 8.
OR Фаза тестирования
За каждым из 10 блоков обучения SRO следовала фаза тестирования, проверяющая сила ранее приобретенных двунаправленных ассоциаций RO.Теперь испытуемые должны были реагировать на предыдущие звуки эффекта фазы сбора информации одним из четырех ответов (см. Рисунок). Ключи ответа были такими же, как и на предыдущем этапе обучения S-R-O. Два исходных звука были сопоставлены с ответом, который производил этот звук в предыдущей фазе (совместимые испытания), тогда как два оставшихся исходных звука были сопоставлены с ответами, которые производили другой звук (несовместимые испытания). Согласно идеомоторной теории, ранее изученные двунаправленные ассоциации R-O должны стимулировать правильный ответ в совместимых испытаниях, но неправильный ответ в несовместимых испытаниях.Эффект совместимости R-O был определен как разница в производительности между несовместимыми и совместимыми испытаниями, усредненная по всем испытаниям фазы испытания отдельно для RT и частоты ошибок. Как и на предыдущем этапе сбора данных S-R-O, этап тестирования был разделен на 12 управляемых и 20 неуправляемых испытаний. Командные стимулы (IS) теперь представляли собой буквы «D», «F», «J», «K», представленные в центре экрана и отображенные на левый средний палец, левый указательный палец, правый указательный палец и правый средний палец, соответственно. .Испытание началось с отображения креста фиксации в течение 500 мс, за которым последовал звук продолжительностью 500 мс. В управляемых испытаниях IS был представлен через 150 мс после начала звука и продолжался до ответа или тайм-аута через 1500 мс. Обратная связь по точности отображалась в течение 650 мс, указывая на правильные, неправильные или слишком медленные ответы. Распределение ITI было таким же, как и на предыдущем этапе обучения S-R-O.
Запись ЭЭГ
ЭЭГ регистрировали с использованием 64 спеченных электродов Ag / AgCl, которые были распределены по крышке электрода (Easycap) в соответствии с международной 10% -ной системой (Klem et al., 1999). Электрод FCz служил в качестве эталона (повторно использовался после определения среднего значения в автономном режиме), а электрод AFz служил заземлением. Импеданс на каждом электроде поддерживался ниже 5 кОм. Два дополнительных электрода использовались для регистрации вертикальных и горизонтальных движений глаз. Один помещался под нижнее веко, а другой на 1 см латеральнее правого глаза. Данные ЭЭГ были оцифрованы с использованием 64-канального усилителя BrainAmp 1 с частотой дискретизации 1000 Гц и записаны с помощью программного обеспечения регистратора BrainVision 1 .
Предварительная обработка ЭЭГ
Все данные ЭЭГ были предварительно обработаны с использованием программного обеспечения Fieldtrip, загруженного в октябре 2016 г. (Oostenveld et al., 2011). Непрерывные данные ЭЭГ были разделены на эпохи, начинающиеся за 250 мс до начала стимула и заканчивающиеся через 2000 мс после начала стимула. Сегментированные данные подвергались высокочастотной фильтрации при 0,2 Гц и низкочастотной фильтрации при 30 Гц. Все каналы использовались для вычисления и применения нового эталона на основе среднего значения. Глазные и другие очевидные артефакты были исправлены путем исключения соответствующих независимых компонентов, поскольку они были визуально идентифицированы на основе топографии и формы волны после того, как независимый компонентный анализ был проведен в Fieldtrip (с использованием параметров по умолчанию и оценкой 63 независимых компонентов в соответствии с количеством электродов).После предварительной обработки данные ЭЭГ были дополнительно сегментированы для создания эпох с блокировкой ответа. Эпохи блокировки ответа варьировались от 350 мс до ответа до 450 мс после ответа (то есть 300 мс после начала исхода). К сегментированным данным ЭЭГ коррекция исходного уровня не применялась.
Анализ ERP
Эпохи активности ЭЭГ с синхронизацией ответа и с синхронизацией стимула были усреднены для каждого повторения SRO, содержащего 40 правильных попыток на повторение SRO у каждого субъекта. Для анализа очень быстрой динамики обучения, связанной с начальными процессами кодирования R-O, мы оценили изменения амплитуды ERP от SRO-rep 1 до SRO-rep 2 (определяемые наклоном линии линейной регрессии, т.е.е., СРО-реп 2 минус СРО-реп 1). Для анализа более медленной динамики обучения, связанной с более постепенными изменениями силы ассоциации, мы определили изменения амплитуды ERP от SRO-rep 2 до SRO-rep 8 на основе наклона линии линейной регрессии, подобранной через средние значения амплитуды всех семи участвующих. Уровни SRO-rep.
Основная цель настоящего исследования состояла в том, чтобы определить связанные с обучением изменения ERP в обоих временных масштабах, которые были конкретно связаны с обучением двунаправленным ассоциациям R-O.С этой целью мы определили корреляции между связанными с обучением изменениями амплитуды ERP и – в качестве прокси для полученной силы двунаправленной связи R-O – поведенческим эффектом совместимости O-R на этапе тестирования.
Наши гипотезы относительно связанных с обучением модуляций амплитуд ERP были основаны на предыдущих исследованиях ERP, которые отличались от настоящего исследования по ряду потенциально важных аспектов. Прежде всего, предыдущие исследования ERP , а не оценивали связанные с обучением модуляции во время начальной фазы обучения R-O.Более того, в предыдущих исследованиях изучались модуляции ERP в условиях свободного выбора, а не в условиях принудительного выбора. Наконец, звуки, вызванные действием, обычно были простыми синусоидальными тонами с короткой продолжительностью около 100 мс, а не более сложными естественными звуками, используемыми в настоящем исследовании, которые развивались с интервалами 300–500 мс. Чтобы быть объективными в отношении возможных связанных с обучением модуляций ERP, отличных от ожидаемых в соответствии с предыдущими исследованиями, мы провели статистический анализ по всем электродам и в относительно больших временных окнах.Необходимая поправка для множественных сравнений (временные точки и электроды) была основана на процедуре определения порогового значения для кластерного экстента, используемой в программном обеспечении fieldtrip (Oostenveld et al., 2011).
Мы проанализировали три временных окна в соответствии с нашими гипотезами. Во-первых, чтобы оценить потенциальное связанное с обучением увеличение эффектов сенсорного ослабления, вызванного действием, мы проанализировали корреляции между эффектом совместимости O-R и ERP с блокировкой ответа во временном окне, варьирующемся от начала ручного ответа до 450 мс позже.Поскольку звук начался через 150 мс после начала реакции, это временное окно покрывает как потенциальные подготовительные эффекты до начала звука, так и типичные эффекты затухания после начала звука. Во-вторых, чтобы оценить потенциальное усиление потенциала готовности, связанное с обучением, мы проанализировали корреляции между эффектом совместимости O-R и ERP с блокировкой ответа во временном окне, начинающемся за 350 мс до начала ручного ответа до начала ответа. В-третьих, чтобы оценить возможные связанные с обучением изменения процессов интеграции результатов, запускаемых стимулом, мы проанализировали корреляции между эффектом совместимости O-R и ERP с блокировкой стимула во временном окне, варьирующемся от начала визуального стимула до 300 мс позже.Это временное окно было ограничено 300 мс, чтобы гарантировать, что ERP будут отражать связанные со стимулом модуляции, не будучи значительно загрязненными нейронной активностью, вызванной дополнительной инструкцией, которая была представлена через 250 мс после начала визуального стимула.
Анализ корреляций между поведенческим эффектом совместимости O-R и связанными с обучением модуляциями ERP проводился для каждого временного окна отдельно и охватывал все электроды и все временные точки в каждом временном окне.Семейно-семейная альфа контролировалась на уровне p <0,05 (двусторонний) на основе порога кластерной протяженности во времени и пространстве (требующего минимум одного соединения между электродами), как реализовано в программном обеспечении Fieldtrip и с использованием моделирования Монте-Карло на основе 5000 перестановок.
Анализ ERP: контроль потенциальных сопутствующих факторов
Мы приняли несколько мер, чтобы минимизировать потенциальное влияние смешанных источников ковариации между модуляциями ERP, связанными с обучением, и поведенческим эффектом совместимости O-R.Напомним, что обоснование исследования основывается на предположении, что межличностные различия в обучении R-O на этапе обучения SRO (проверяются изменениями ERP) должны приводить к разной силе ассоциации R-O (проверяется эффектом совместимости O-R на последующей фазе тестирования). Однако корреляция между эффектом совместимости OR и предшествующими модуляциями ERP, связанными с обучением, может быть затруднена двумя альтернативными источниками совместной вариации: один связан с межличностными различиями в способности разрешать конкуренцию, а другой – с межличностными различиями в общая обучаемость.
Во-первых, межличностные различия в разрешающей способности соревнований могут не только повлиять на размер эффекта совместимости ИЛИ из-за повышенных требований разрешения соревнований в несовместимых и совместимых испытаниях фазы тестирования, но и могут аналогичным образом повлиять на связанные с обучением модуляцию ERP во время предшествующая фаза обучения SRO, которая связана с изменяющимися требованиями разрешения конкуренции между правильным ответом на данный стимул и тремя альтернативными (но неправильными) вариантами ответа.
Во-вторых, межличностные различия в общей способности к обучению могут не только влиять на процессы обучения, выраженные в связанных с обучением модуляциях ERP на этапе обучения SRO, но могут аналогичным образом влиять на процессы обучения, происходящие на этапе тестирования, что может влиять на эффект совместимости OR 2 . В частности, такие процессы обучения фазы тестирования могут быть связаны с повторным подключением или повторным обучением старого двунаправленного отображения RO в соответствии с недавно проинструктированным отображением между предыдущими результатами (теперь служащими в качестве предшествующих стимулов) и новыми ответами фазы тестирования. .Это имеет два возможных следствия. Первое следствие состоит в том, что даже если хороший ученик входит в фазу тестирования с сильными двунаправленными ассоциациями R-O, это, тем не менее, может привести к относительно слабому общему эффекту совместимости O-R, поскольку старое двунаправленное отображение R-O можно быстро перенастроить. Это, в свою очередь, означало, что большие связанные с обучением ERP-модуляции из-за более сильного обучения R-O будут связаны с более слабыми эффектами совместимости O-R, а не с более сильными эффектами совместимости O-R.Эта неоднозначность усложняет интерпретацию направления корреляции между модуляциями ERP, связанными с R-O-обучением, и эффектом совместимости O-R. Однако любая значимая корреляция – независимо от того, в каком направлении – позволяет сделать вывод о том, что выявленная модуляция ERP, связанная с обучением, так или иначе связана с обучением R-O. Второй вывод потенциально более проблематичен. В частности, межличностные различия в общей способности к обучению могут не только влиять на модуляцию ERP, связанную с обучением O-R, но также могут влиять на модуляции ERP, связанные с обучением S-R.Следовательно, значительная корреляция между эффектом совместимости ИЛИ и связанной с обучением модуляцией ERP может быть связана с ко-вариацией между способностью повторного обучения RO / OR на этапе тестирования и способностью к обучению SR (вместо способности обучения RO) в предыдущем обучении SRO. фаза.
К счастью, межличностные различия в способности к обучению S-R и межличностные различия в способности разрешать конкуренцию как два потенциальных соосновательных фактора отражаются схожими поведенческими показателями и, следовательно, могут контролироваться очень похожим образом.В частности, индивидуальные различия в этих двух способностях должны выражаться в различиях в связанных с обучением изменениях в частоте ошибок и времени отклика. Например, сильное сокращение количества ошибок может быть связано с высокой способностью к обучению S-R, высокой разрешающей способностью конкуренции или сочетанием того и другого. Соответственно, перед вычислением корреляций между эффектом совместимости OR и изменениями ERP, связанными с обучением, мы регрессировали связанные с обучением изменения в частоте ошибок и времени отклика (соответствующие конкретному оцениваемому изменению ERP) в качестве заместителей для изменений в конкуренции / прогрессе в ответах Обучение СР на этапе обучения СРО.Связанная с этим мера была принята как специальная обработка в отношении перехода от фазы управляемого обучения (наличие сигнала инструкции) к фазе неуправляемого обучения (отсутствие сигнала инструкции). Этот резкий переход может означать изменения в конкуренции ответов / прогрессе в обучении S-R, которые недостаточно улавливаются соответствующими изменениями RT и коэффициентов ошибок. Поэтому мы выполнили дополнительный контрольный анализ, касающийся обучения в более медленной шкале времени (т. Е. Линейное изменение ERP от SRP-rep 2 к SRO-rep 8), где мы отдельно оценили переход от управляемого к неуправляемому повторению SRO (линия линейной регрессии, подогнанная через среднее значений амплитуды от SRO-rep 2 до SRO-rep 4) и динамики обучения только через неуправляемых повторений SRO (линия линейной регрессии, построенная через средние значения амплитуды от SRO-rep 4 до SRO-rep 8).
Результаты
Поведенческие результаты (этап обучения S-R-O)
На рисунке показаны кривые обучения для всех повторений SRO в RT и коэффициенте ошибок. Статистический анализ (на основе ANOVA с повторными измерениями с фактором повторения SRO) подтвердил ключевые особенности двух профилей обучения в том виде, в каком они появляются на описательном уровне. Как правило, увеличение повторений SRO было связано с общим падением времени отклика ( F (7,203) = 59.98; p (F) <0,001; ηp2 = 0,674) с одновременным увеличением количества ошибок ( F (7,203) = 23,21; p (F) <0,001; ηp2 = 0,445). Испытания с управляемым обучением (от SRO-rep 1 до SRO-rep 3) характеризовались быстрым увеличением производительности ( F (2,58) = 115,43; p (F) <0,001; ηp2 = 0,799). В SRO-rep 4 (т. Е. Первые неуправляемые испытания) RT ненадолго увеличилось, вероятно, из-за перехода к неуправляемой фазе, на что указывает t-тест , сравнивающий SRO-rep 4 с SRO-rep 3 ( t ( 29) = 2.08; p (t) <0,046, двусторонний) до того, как RT продолжили постепенно уменьшаться при повторении 4-8 ( F (4,116) = 10,97; p (F) <0,001; ηp2 = 0,274). Неудивительно, что частота ошибок была низкой во время контролируемых испытаний с небольшим, но значительным увеличением ( F (2,58) = 4,47; p (F) <0,017; ηp2 = 0,134). В SRO-rep 4 (то есть при первом неуправляемом повторении) частота ошибок резко возросла, на что указывает тест t , сравнивающий SRO-rep 4 с SRO-rep 3 ( t (29) = 5.43; p (t) <0,001) перед тем, как снова постепенно уменьшаться в неуправляемых повторениях 4–8 ( F (4,116) = 16,89; p (F) <0,001; ηp2 = 0,368).
(A, B) Поведенческие данные на этапе сбора данных S-R-O. Ответы управлялись пространственным сигналом инструкции во время повторений SRO с 1 по 3. Начиная с повторения SRO с 4 по 8, сигналы инструкции больше не представлялись. (C, D) Поведенческие данные на этапе тестирования O-R.Ответы руководствовались символической инструкцией во время повторений O-R с 1 по 3. Начиная с повторений O-R с 4 по 8, сигналы инструкции больше не подавались.
Поведенческие результаты (фаза OR-теста)
Мы вычислили два отдельных ANOVA с повторными измерениями для частот ошибок и RT с факторами OR совместимости и OR повторений (т.е. его тестовая фазовая характеристика). Анализ частоты ошибок привел к очень значительному эффекту совместимости O-R ( F (1,29) = 21.39, p <0,001; ηp2 = 0,425) с ошибками в среднем 11,2% в совместимом состоянии и 14,8% ошибками в несовместимом состоянии. Анализ RT привел к очень значимому эффекту совместимости OR ( F (1,29) = 18,81, p <0,001; ηp2 = 0,393) со средним значением 592 мс в совместимых условиях и 622 мс в несовместимое состояние. Кроме того, взаимодействие между совместимостью O-R и повторениями O-R в частоте ошибок только что достигло значимости ( F (7,203) = 2.27, p = 0,048, поправка по Гринхаусу-Гейссеру). Однако это взаимодействие следовало довольно сложному и немонотонному паттерну (в основном за счет эффекта полиномиального контраста 7-го порядка с p <0,007), которое кажется трудным для интерпретации с точки зрения постепенных изменений, связанных с обучением. Что касается времени отклика, такого эффекта взаимодействия не обнаружено ( F (7,203) = 0,72, p = 0,61).
Поведенческий индекс силы ассоциации RO, который позже использовался для корреляции с показателями различия ERP, был определен как индивидуальный средний эффект совместимости OR в RT, обеспечивая более согласованный показатель для всех повторений OR по сравнению с эффектом совместимости при ошибке ставки.Более того, наблюдение, что эффект совместимости O-R тестовой фазы в RT значительно снизился с , а не с , при повторении O-R, предполагает, что на этот показатель , а не сильно повлияло повторное подключение ранее установленных двунаправленных ассоциаций R-O. Скорее, ранее установленные ассоциации R-O, похоже, сосуществуют с недавно проинструктированными ассоциациями между бывшим O (теперь S) и вновь проинструктированными ответами фазы тестирования, по крайней мере, на время фазы тестирования.В противном случае увеличение числа испытаний на обучение фазе тестирования должно было привести к более сильному изменению проводки и, следовательно, к все более слабому эффекту совместимости O-R. В свою очередь, это предполагает, что межиндивидуальная изменчивость в размере общего эффекта совместимости OR преимущественно отражает межиндивидуальные различия в размере устойчивой систематической ошибки выбора ответа, вызванной ранее установленными двунаправленными ассоциациями RO, а не отражением межиндивидуальных различий в способность к (повторному) обучению.Кроме того, эффект совместимости O-R существенно не коррелировал с поведенческими показателями, связанными с обучением, на предыдущей фазе обучения SRO. В частности, не было значимых корреляций (все p (r) > 0,49) с RT или изменением частоты ошибок как в отношении быстрой шкалы времени (SRO-rep 1 против SRO-rep2), так и более медленной шкалы времени (SRO-rep 2 против SRO-rep 8). Отметим, что предыдущие выводы в этом отношении были неоднозначными. Хотя мы обнаружили значительную корреляцию между эффектом совместимости O-R и изменением RT, связанным с обучением, в одном исследовании (Ruge et al., 2012), это не могло быть воспроизведено в последующем исследовании (Ruge and Wolfensteller, 2015). Ни в одном из этих предыдущих исследований не сообщалось о значительной корреляции с изменениями количества ошибок, связанных с обучением. Следовательно, вместе эти результаты предполагают довольно ненадежную связь между эффектом совместимости O-R и поведенческими показателями, связанными с обучением.
Результаты ЭЭГ
ERP с блокировкой ответа – Модуляции после ответа
Этот анализ был основан на временном окне от 0 мс до 450 мс относительно начала ответа (т.е.е., от -150 мс до 300 мс относительно начала звукового исхода). В быстрой шкале времени мы идентифицировали два пространственно-временных кластера, которые продемонстрировали значительную корреляцию между изменением амплитуды ERP от SRO-rep 1 к SRO-rep 2 и поведенческим эффектом совместимости OR (см. Рисунок): лобно-центрально распределенный кластер продемонстрировал отрицательную корреляцию. во временном окне от 79 мс до 262 мс ( p <0,0006, FWE-коррекция на уровне кластера) и левый латерализованный кластер, включающий лобно-височные и теменно-височные электроды, показал положительную корреляцию во временном окне от 42 мс до 244 мс ( p <0.016, исправлено FWE на уровне кластера). Рисунок суммирует эти корреляции с помощью диаграмм разброса для соответствующих пиковых электродов и усредненных по всем значимым временным точкам в каждом кластере. В таблице дополнительно представлены эти корреляции на основе среднего времени в цифрах и показано, что эффекты, наблюдаемые в быстрой шкале времени, не распространяются на более медленную шкалу времени. Чтобы лучше оценить направление изменений амплитуды как функцию эффекта совместимости O-R, на рисунках показаны средние изменения амплитуды ERP после медианного разделения в соответствии с размером эффекта совместимости O-R.Такое представление исходных результатов предполагает, что субъекты, демонстрирующие большой эффект совместимости O-R, демонстрируют снижение связанного с обучением увеличения позитивности на FC4 (параллельно с обратным эффектом на PO7) по сравнению с субъектами, демонстрирующими небольшой эффект совместимости O-R. Обратите внимание, что даже несмотря на то, что этот эффект распространился на временное окно слухового компонента N1, он явно не связан со стандартным эффектом сенсорного ослабления. Фактически, эффект сенсорного ослабления характеризуется уменьшением негативности в пределах диапазона латентности N1, тогда как существующий эффект указывал точно в противоположном направлении (т.е.е. относительно увеличил отрицательность или, другими словами, относительно уменьшил положительность).
Взаимосвязь между связанными с обучением изменениями потенциала связанных событий с блокировкой отклика (ERP) в быстрой шкале времени (т. Е. Переход от SRO-rep 1 к SRO-rep 2) и поведенческим эффектом совместимости O-R. (A) Значимые пространственно-временные кластеры (отмечены черными точками) для корреляции между изменениями ERP и совместимостью O-R. (B) Примерные графики рассеяния для электродов с наиболее сильными эффектами корреляции, усредненными по всем моментам времени в соответствующем пространственно-временном кластере. (C) Медианное представление данных диаграммы рассеяния. (D) Медианное представление непрерывных временных интервалов ERP для пиковых электродов в соответствующих кластерах. Заштрихованные области обозначают приблизительное временное окно значительных корреляционных эффектов.
Таблица 1
Сводка корреляций между эффектом совместимости O-R и изменениями амплитуды связанного с событием потенциала с синхронизацией отклика (ERP) на соответствующих пиковых электродах в каждом идентифицированном кластере .
| Изменение ERP с SRO-rep 1 на 2 | Изменение ERP с SRO-rep 2 на 8 | Изменение ERP с SRO-rep 2 на 4 | Изменение ERP с SRO-rep 4 на 8 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Кластеры, идентифицированные в очень быстрой шкале времени (изменение ERP с SRO-rep 1 на 2) | Фронтоцентральный (пик FC4) | r = -0,68 | r = 0,2 9028 | NA | NA | ||||||
| 79–262 мс | p (r) <0.00003 | p (r) <0,30 (нс) | |||||||||
| Задний (пик PO7) | r = 0,56 | r = −0,12 NA | r = −0,12 NA | NA||||||||
| 42–244 мс | p (r) <0,0014 | p (r) <0,53 (нс) | NA | NA | Кластеры, идентифицированные на более медленной шкале времени (изменение ERP с SRO-rep 2 на 8) | Frontocentral (пик Fz) | r = -0.23 | r = 0,62 | r = 0,27 | r = 0,38 | |
| 327–436 мс | p (r) ) | p (r) <0,0003 | p (r) <0,15 (нс) | p (r) <0,037 | |||||||
| r = 0.08 | r = −0,55 | r = 0,01 | r = −0,44 | ||||||||
| 312-450 мс | p 9007 | (r 9007) 90 (нс) | p (r) <0,002 | p (r) <0,97 (нс) | p (r) <0,015 |
| Изменение ERP с SRO-rep 1 на 2 | Изменение ERP с SRO-rep 2 на 8 | Изменение ERP с SRO-rep 2 на 4 | Изменение ERP с SRO-rep 4 на 8 | |||
|---|---|---|---|---|---|---|
| Кластеры, идентифицированные в очень быстрой шкале времени (изменение ERP с SRO-rep 1 на 2) | Нет | NA | NA | NA | NA | |
| Кластеры определены на медленной шкале времени (Изменение ERP с SRO-rep 2 на 8) | Frontocentral (пик F3) | r = 0.29 | r = −0,55 | r = −0,33 | r = −0,28 | |
| 64–150 мс | 21 < p 0,12 (нс) | p (r) <0,002 | p (r) <0,072 * | p (r) <0,13 (нс) | ||
| Задний (пик P8) | r = 0.21 | r = 0,60 | r = 0,48 | r = 0,35 | ||
| 45–159 мс | p (r6) | p (r6) ) | p (r) <0,0004 | p (r) <0,007 | p (r) <0,061 * | исключить, что эти эффекты были вызваны исключительно переходом от управляемых испытаний к неуправляемым испытаниям, мы отдельно оценили корреляции между эффектом совместимости OR и линейным изменением амплитуды ERP от SRO-rep 2 к SRO-rep 4 (переход с управляемого на неуправляемый ), а также линейное изменение амплитуды ERP от SRO-rep 4 к SRO-rep 8 (через неуправляемые испытания).Как показано в таблице, картина не была такой четкой, как для данных с блокировкой ответов, с точки зрения статистической значимости. Тем не менее, численно корреляции для лобно-центрального кластера были довольно похожими для изменений амплитуды ERP при управляемых и неуправляемых повторениях SRO ( r = -0,33) и в пределах неуправляемых повторений ( r = -0,28), что позволяет предположить, что исходная корреляция ( r = -0,55) была обусловлена более или менее одинаково обеими сторонами. То же самое и для заднего кластера.Таким образом, это снова опровергает возможность того, что исходные корреляционные эффекты были в первую очередь вызваны управляемым переходом к неуправляемому.